

※詳細は変更する可能性があります。
[2011の課題コース]
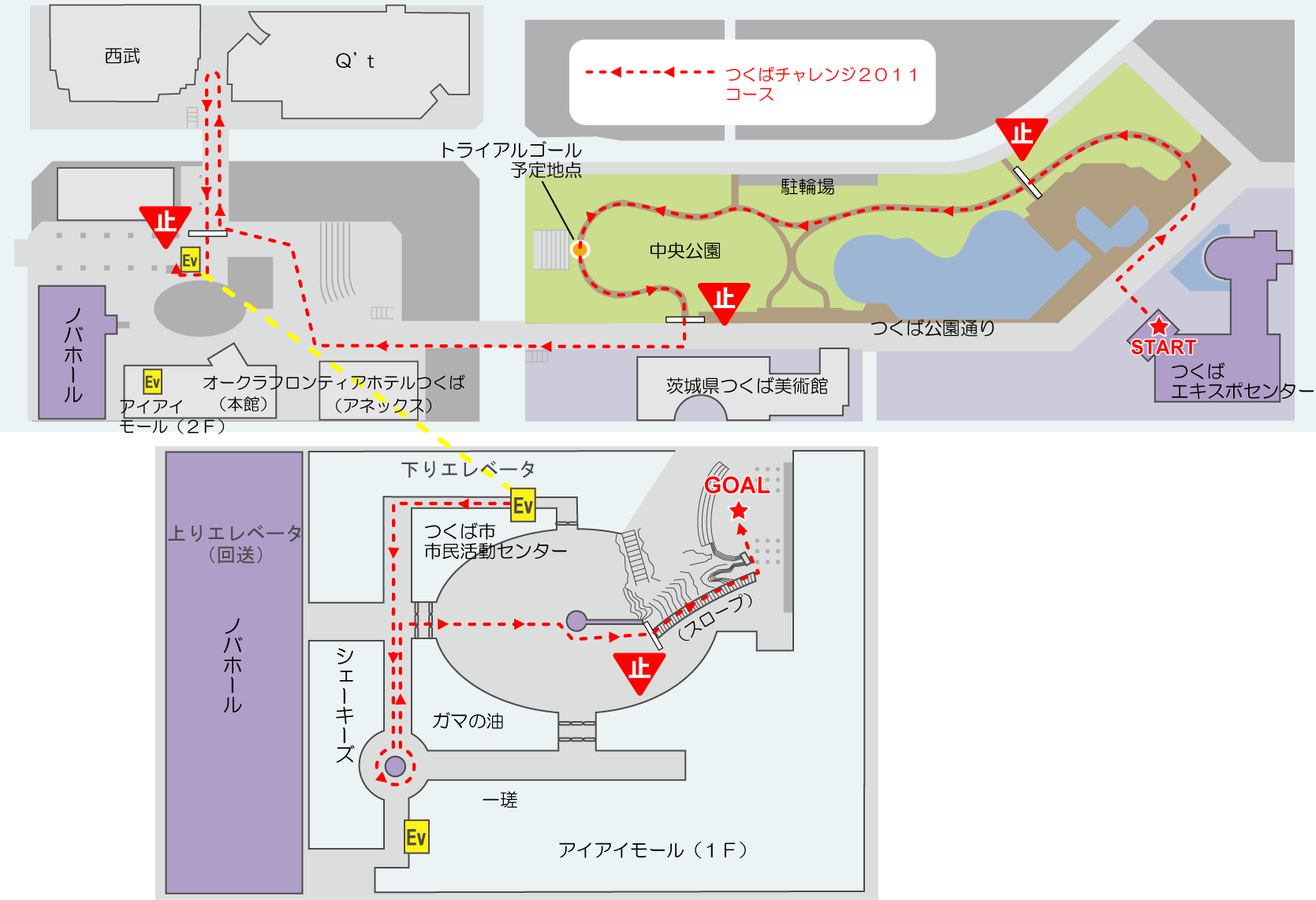
つくばエキスポセンターを起点に~つくば公園通り~つくば中央公園内の遊歩道~つくば公園通り~を経て、つくば駅前プラザ(ペデストリアンデッキ)を周回~エレベータにて1Fに降下~つくばセンターの屋内商店街(アイアイモール)の廊下を周回した後~アイアイモール1Fの屋外広場(フォーラム)に出て~緩やかな狭いスロープを登りゴールする、1.4km強の区間。
[達成すべきロボットの動作]
自立・自律ロボットが、決められた日時(後述)に、決められたコース(前述・上図)を、2時間以内に自律的に走行すること。 ロボットはこのコースを、通行人や障害物あるいは他のロボットに衝突することなく、また、その通行の邪魔をしないようにして走行する。
ここで自律的とは、スタート後(安全等のために指示される以下の場合を除き)ロボットの行動に影響を与える操作を一切しないことをさす。ロボットを遠隔から制御することはもちろん、環境内に動作ガイドとなるものを配置あるいはそれを移動させて、環境条件を通じてロボットの動作に変化を与えるような操作も許されない。
[ロボット]
エネルギー源及び情報処理系など動作に必要なすべての機能を内蔵した自立ロボットであること。ロボットは、この課題達成のために必要なハードウェア・ソフトウェアを全て内蔵し、また環境や動き方に関する情報を予め持っていることが求められる。
[環境]
上記課題を実行する環境は、つくば市民が日頃生活しているあるがままの遊歩道などの環境とする。したがって、通常、人や自転車が通行している。つくばチャレンジでは危険防止のため、この道にいる通行人や見物人にはロボットに注意することを求めるが、ロボットの走行領域と市民が歩く領域を分けることはしない。天候はチャレンジ当日の天候条件による。また、路面の状況(水たまり、落ち葉)なども前日やそれ以前の天候や社会的条件(町中清掃など)に大きく影響を受ける。ロボットが、環境中に元々存在している街路樹や縁石、柵、あるいは、周りの建物等を走行のガイドとして用いることは自由である。しかし、ロボットの走行のために環境中にガイドとなるものを新たに設置したり、環境を改変することは許されない。例えば、もともと存在するGPS衛星などはそのまま利用できるが、これを中継するための地上局をロボットのために環境内に設置することは許されない。
[安全のための一旦停止]
ロボットは走行中は常に自律的に動作することを原則とするが、市民の安全のため必要に応じて以下のオペレータの操作に従うことが求められる。
1.オペレータが危険の可能性を察知した場合はロボットを停止させ、危険がなくなった時点で走行を再開させること。
2.コース中のあらかじめ定められた数カ所(自転車等の動線を横切る地点など)では、ロボットは自ら停止して、オペレータの安全確認後の指示を得て走行を再開すること。
【つくばチャレンジ2011の課題コースについて】 ※2011年3月追記
1.トライアルゴール
つくばチャレンジ2011では例年どおり本走行ファイナル(11月16日)に先立って、前日(11月15日)に本走行トライアルを行います。このトライアルではつくばチャレンジ2011のコースの前半部約500mと言う、昨年までに比して長い区間を課題とします。この区間を自律走行したロボットをトライアル通過とし、トライアルを通過したロボットのみが本走行ファイナルに参加できます。
一昨年度までのつくばチャレンジでは、トライアル走行は、それなりの制御の下にロボットが走行しているかどうかを評価することが実施的な目的でした。しかし近年、つくばチャレンジに参加するロボットの全体のレベルが当初に比して極めて高くなり、それによってつくばチャレンジ2011では課題コースの走破も難しくなっています。そこで、トライアル通過にもかなり高いレベルの自律走行技術を求めることにしました。
コースの差違がありますので一概には言えませんが、2011のトライアル区間を走破することは、つくばチャレンジ初年度(2007)のコース全体の走破よりひとまわり難しいのではないかと考えられています。
2.つくばセンター広場の走行について
コース後半のつくばセンター広場においては、原則として走るべきコースは定めず、規定の折り返し点まで行って戻ってきてエレベータホールに向かうまでの区間は、橋の上を除いてほぼ自由とします。ここは広場であり、場合によっては他のイベントが開催されていたり工事車両がいることがあります。が、その場合でも、目的地までの走行が可能なだけのスペースの余裕は必ずあると想定されます。したがって、ロボットには、走行日当日の状況に確実に対処して折り返し点までの往復をするよう走行させてください。
3.「段差」及び「橋の端部」へ近づくことの禁止(安全確保のため)
つくばチャレンジ2011のコースには、階段の近くを走行する部分や、橋を通過する部分があります。仮にロボットが暴走して階段を落ちると、下に居合わせる人に大きな危険が発生します。また、橋の欄干に衝突して部品等を下に落とすと下の道路の歩行者や走行中の自動車に被害を与える恐れがあります。
そこで、ロボットはそれらの階段・段差や橋の欄干へ1m以上近づいてはならないこととして、つくばチャレンジを運用します。もし、自律走行中に階段や橋の欄干まで1m以内のエリアにロボットの一部が入った場合は、至急非常停止をさせて下さい。(走行は、そこで失格となります。)
4.エレベータへの搭乗について
ロボットがエレベータに搭乗する際、エレベータの押しボタン操作はオペレータがすることとします。ただし、オペレータはロボットに手を触れたり操作することなく、ロボットは自ら自律的にドアの開閉の判断をしてエレベータへの乗り降りをして下さい。この際、オペレータは必要に応じてエレベータの扉を開けるボタンを押し続けて下さい。
エレベータには原則として、ロボットと開発チームメンバー(オペレータと安全管理責任者を含む)、(および、本走行においては担当委員)のみが乗ることとします。
なお、もしほかの乗客がいるときは、実験をしていることを説明の上、理解が得られれば、同乗してもらうか次の便を待ってもらい、もしその理解が得られなければ、その人に搭乗を譲って下さい。
※2011年8月追記
(※2011年11月8日補足)油田委員長から以下の注意とお願いが有りました。
(1)エレベータホールへの入り方。
エレベータホールで他の通行人やロボットがエレベータを待っている時は、エレベータホールに新たに入らないよう、外の白線でロボットを待たせて下さい。
(2)エレベータの押しボタンについて
エレベータを呼ぶボタンは、エレベータ前にロボットが乗れるのを待つ状態で停止してから押して下さい。(ロボットが離れたところにいる時に呼びボタンを押してドアを開けたままでロボットを待つことはやめて下さい。)
これは他の利用者(市民)に対して迷惑をかけないための注意です。
(3)エレベータの乗り方
エレベータのドアの前で待つ時は到着したエレベータから人が降りてくることを想定して余裕のある位置で待って下さい。
なお、もし、車椅子の人がエレベータにいて降りようとする場合は、一旦、ロボットを手動で停止させた上で、手で動かして道を譲り、車椅子が通り抜けてから元の位置に戻して動作を再開させて下さい。
また、車椅子でなくとも降りてくる人によっては手動でロボットを停止させる必要も想定されます。エレベータの中に人がいて、降りるのに時間がかかっている時も必要に応じてロボットの動作を手動で停止させて待たせて下さい。いずれにせよ、エレベータを利用している市民の安全と利便を第一に考えて操作をお願いします。
*(注) エレベータホールにロボットが入る前にエレベータを呼び、エレベータが到着してからロボットの動作を再開させることにすれば、確かに他のエレベータ利用者との錯綜を防ぐことができます。しかし、そうすると1Fでエレベータを待っている人を必要以上に待たせる恐れがあります。②のお願いはそれを防ぐものです。実は、11月5日の実験中にもエレベータの呼ボタンを押し続けている状態が頻繁に起こっており、迷惑がかかっているとのクレームがセンタービルの守衛さんからありました。(!)
以上、ご協力をお願いします。
5. エレベータへの搭乗のための行列について
エレベータには先にエレベータ前に着いたロボットから一台ずつ順に搭乗することにします。このため、場合によっては、ロボットは列を作って待つ必要があります。ロボットにはこの列に待つ動作を自律的に行わせて下さい。
待つべきレーンは予め地面にテープを貼って指示し、エレベータ前に停止線を置きます。ロボットがこのレーンに並んだ後、先頭に着いたら、この停止線で待つこととし、オペレータは他の乗客やロボットがいないことを確かめてから再開の操作をして下さい。ロボットはそれに従ってエレベータに乗るための走行動作を再開することとします。
他のロボットを追い抜かずロボットが自律的に列に並ぶには、かなり高度な環境認識と動作制御の能力を必要とすると予想されます。
(※2011年11月8日補足)油田委員長から以下の注意とお願いが有りました。
エレベータに乗る際の列の並び方、及び、ゴール前のスロープでの待ち方について何人かからご質問を頂きました。
「走行のアルゴリズムが定められていないロボットに自律的に列に並ばせたり、何かを譲り合わせる。」という動作の実験は、おそらく、世界的にも例がないと思います。したがって、どのような整理をするのが良いかは正直なところ私にもわかっていません。
8月11日のメールにも書きましたように、今回のつくばチャレンジでは参加メンバーが各々の良識に従ってロボットを作り、その上でどのようなことが起こるかを、皆で実験し経験するチャンス、とお互いに位置づけたいと考えております。
したがって、つくばチャレンジ参加の皆さまには、改めて、持っている技術と良識に従って、ロボットの行動を設計して頂くようお願いしています。
もし、走行時にとくにまわりに大きく迷惑がかかることが起きれば、そのロボットの行動の設計は適切でなかったということになります。したがって、つくばチャレンジ本走行で、もし、まわりに大きく迷惑がかかっていると、判断される
(たとえば、随走するつくばチャレンジ委員に)ことが起これば、その時点で走行を失格と判断させて頂くことは起こり得ます。
これについては、ご理解をお願いします。
6. ショッピングモールからオーバル広場への出口の小さな段差について
つくばセンタービルのショッピングモール(屋内)からオーバル広場(屋外)に出るところには約3cmの下り段差があります。ここは若干斜めになっていますが、ロボットはここを自律的に通り抜ける必要があります。
7. ゴール前のスロープ(交互一方通行)について
ゴール前には幅の狭い上りスロープがあり、ロボットはこれを自律的に走行することが求められます。一方、ゴールから帰るロボットもここを通るので、この区間は交互一方通行とします。
ロボットはこのスロープ区間に入る前の停止線で一旦停止し、オペレータは走行可能であることを判断したのち走行を再開させて下さい。