

※詳細は変更する可能性があります。
「スタートからトライアルゴールまでのレーザースキャナデータ・オルソ地図」を掲載しました(2010年10月25日掲載)。
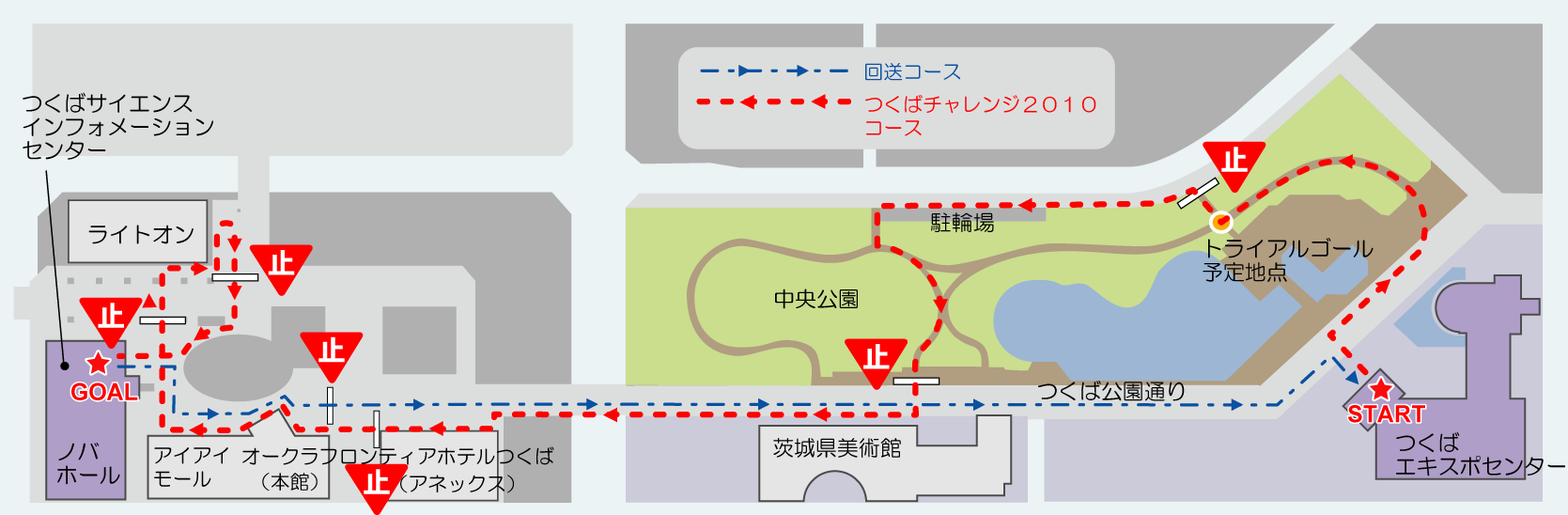
[2010コース]
「つくばエキスポセンター」から出発し、「つくば中央公園」内、公園脇バス通り歩道、つくば公園通りの遊歩道を経て「つくばセンター広場」を走行し、「つくばサイエンスインフォメーションセンター」をゴールとする1.1km強のコース。
[達成すべきロボットの動作]
自立・自律ロボットが、決められた日時(後述)に、つくばエキスポセンターからつくば公園通りの遊歩道やつくば中央公園内、公園脇バス通り歩道、つくばセンター広場等を通って、つくばサイエンスインフォーメーションセンターまでの1.1km強のコースを、2時間以内に自律的に走行すること。 ロボットはこのコースを、通行人や障害物あるいは他のロボットに衝突することなく、また、その通行の邪魔をしないようにして走行する。
ここで自律的とは、スタート後(安全等のために指示される以下の場合を除き)ロボットの行動に影響を与える操作を一切しないことをさす。ロボットを遠隔から制御することはもちろん、環境内に動作ガイドとなるものを配置あるいはそれを移動させて、環境条件を通じてロボットの動作に変化を与えるような操作も許されない。
[ロボット]
エネルギー源及び情報処理系など動作に必要なすべての機能を内蔵した自立ロボットであること。ロボットは、この課題達成のために必要なハードウェア・ソフトウェアを全て内蔵し、また環境や動き方に関する情報を予め持っていることが求められる。
[環境]
上記課題を実行する環境は、つくば市民が日頃生活しているあるがままの遊歩道などの環境とする。したがって、通常、人や自転車が通行している。つくばチャレンジでは危険防止のため、この道にいる通行人や見物人にはロボットに注意することを求めるが、ロボットの走行領域と市民が歩く領域を分けることはしない。天候はチャレンジ当日の天候条件による。また、路面の状況(水たまり、落ち葉)なども前日やそれ以前の天候や社会的条件(町中清掃など)に大きく影響を受ける。ロボットが、環境中に元々存在している街路樹や縁石、柵、あるいは、周りの建物等を走行のガイドとして用いることは自由である。しかし、ロボットの走行のために環境中にガイドとなるものを新たに設置したり、環境を改変することは許されない。例えば、もともと存在するGPS衛星などはそのまま利用できるが、これを中継するための地上局をロボットのために環境内に設置することは許されない。
[安全のための一旦停止]
※2010年追記
ロボットは走行中は常に自律的に動作することを原則とするが、市民の安全のため必要に応じて以下のオペレータの操作に従うことが求められる。
1.オペレータが危険の可能性を察知した場合はロボットを停止させ、危険がなくなった時点で走行を再開させること。
2.コース中のあらかじめ定められた数カ所(自転車等の動線を横切る地点など)では、ロボットは自ら停止して、オペレータの安全確認後の指示を得て走行を再開すること。
[参考データ]
芝浦工業大学 工学部土木工学科 ジオインフォマティクス研究室(中川研究室)のご協力により、「スタートからトライアルゴールまでのレーザースキャナデータ・オルソ地図」のデータを配布させて頂きます。
********以下、中川先生より*******************************
地上設置型レーザースキャナ(RIEGL VZ400)により,mm精度で計測した点群データを,空間解像度10cmの平面地図(正射投影図)に変換しています。
1ピクセルが10cmの画像地図になっていますので、Gimpなどの画像処理ソフトなどを使えば,コースの現況を実測値で把握できます。
相対座標ではGooglemapよりもだいぶ正確ですので、どうぞご活用ください。
そのほかデータの説明:
・1ピクセル=10cm
・方位:画像の上方向は磁北ではない
・絶対座標値:なし
コース図の下記の部分が詳細平面地図に生成されています。右画像をクリックすると実データがダウンロード出来ます。
 ------→
------→

お問合せ:芝浦工業大学工学部土木工学科 中川(mnaka(@)shibaura-it.ac.jp)