言語
NTFトップ > マイクロマウス > マイクロマウス2014 > 大会レポート > マイクロマウスクラシック競技レポート
吸引式マイクロマウスが史上初の優勝。1位「紫電改」、2位「ハセシュマウス ver.3.0」がともに吸引機構を搭載している。他に2台の吸引式マイクロマウスが決勝進出を果たした。
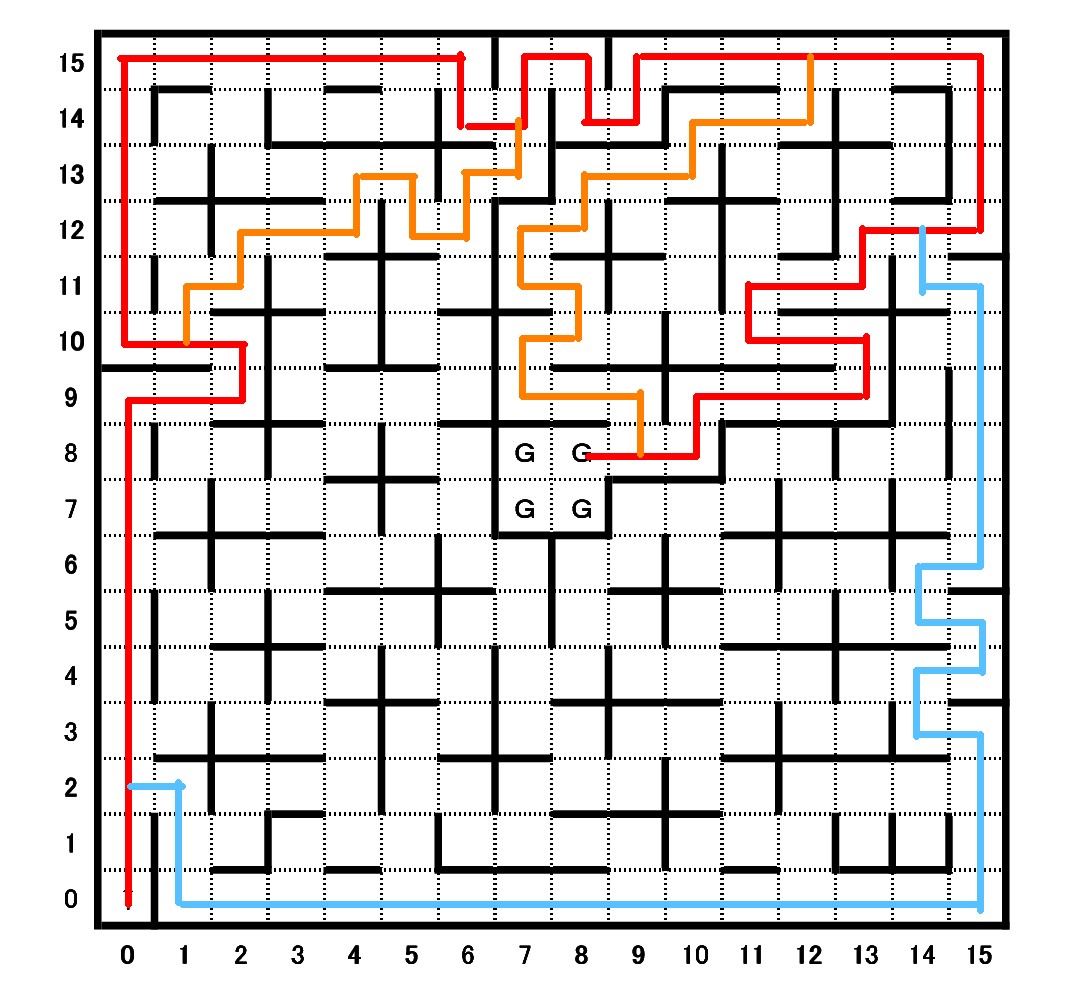
【画像】予選迷路。西回り56歩23折(赤)、50歩33折(橙)、 南回り50歩23折(青)
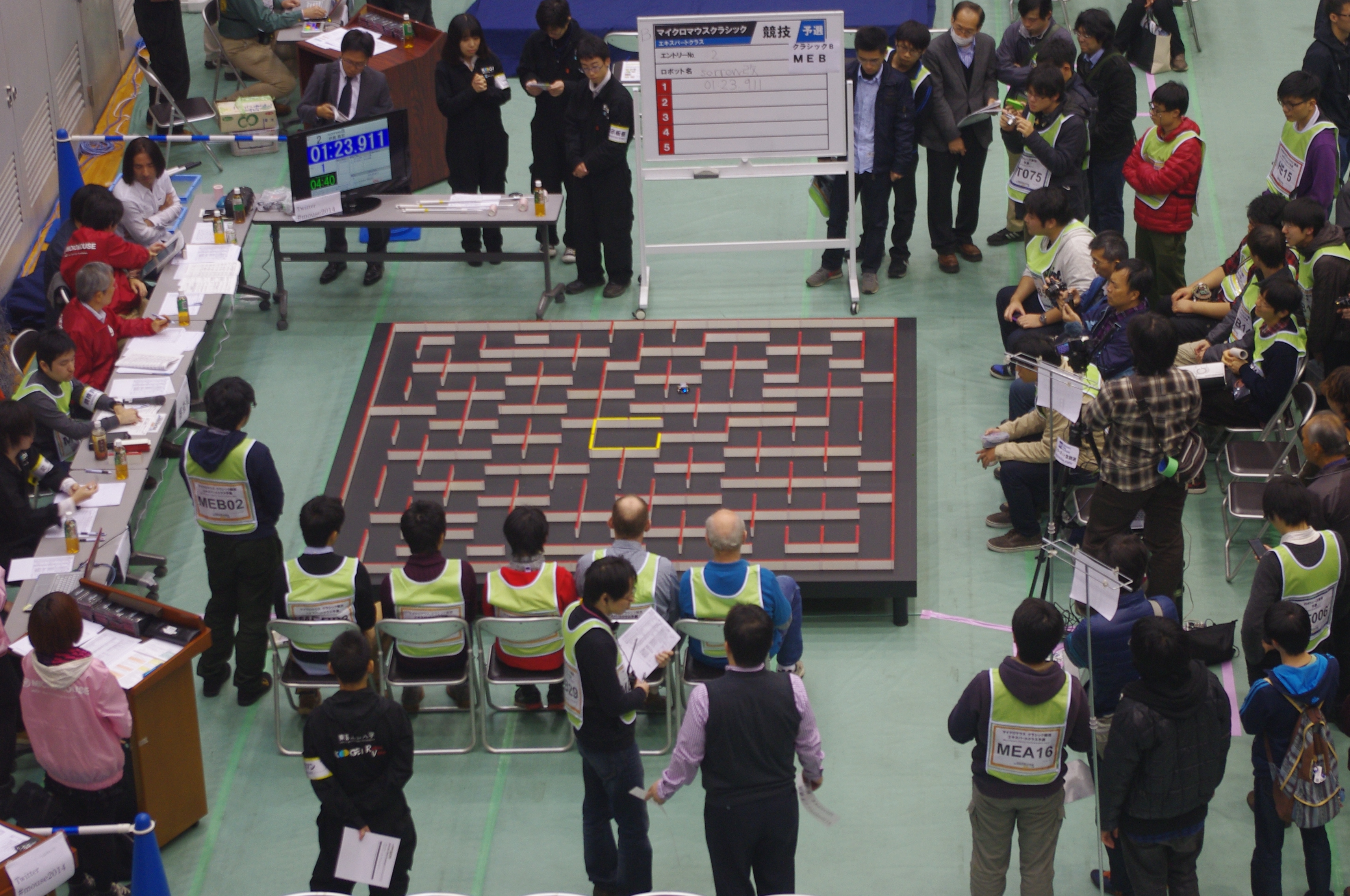
【画像】予選風景。
決勝出場権を得たのは12秒台で走行したマウスまで22台。地区大会でシード権を得たマウスを合わせて30台と審査員特別枠1台が決勝迷路に挑んだ。決勝は28台(90.3%)がゴールに到達。第2走行は24台(77.4%)が成功した。
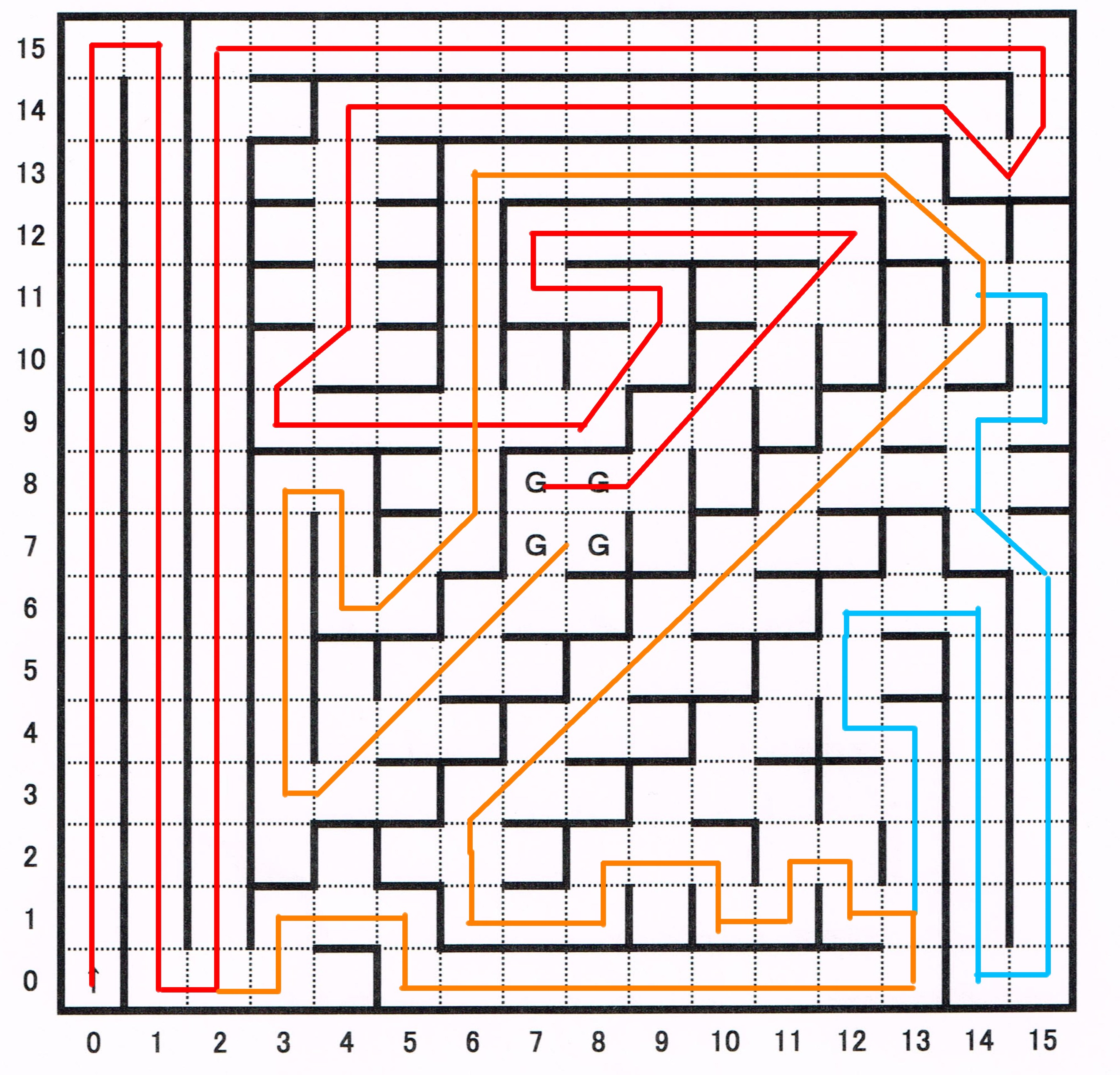
【画像】決勝迷路。西回り104歩27折(赤)、 南回り110歩53折(橙)、110歩39折(青)
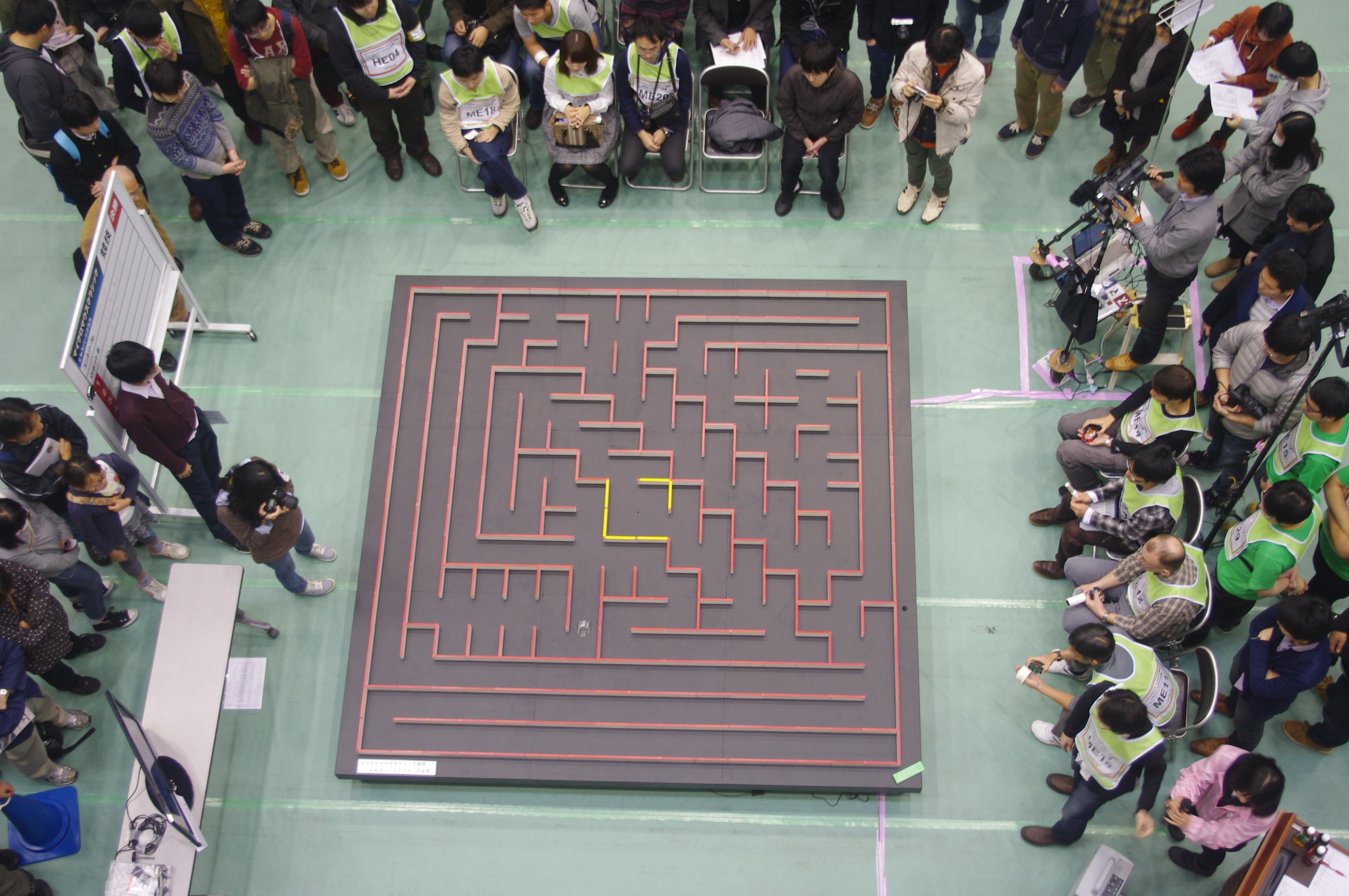
【画像】決勝風景。
最短経路は、マイクロマウスが迷路を走行するうえで必要な制御技術を全て備えていないと、クリアできないルートだった。5回のチャレンジを全て成功させたのは、優勝した紫電改とDAI-WAN(Wu,Wen-Chi / Shih,Kai-Hsiang /Lunghwa University of Science and Technology)だけだった。
今大会で初優勝した宇都宮さんは、大学生時代から1区画内の姿勢制御に拘りをもっていたことが知られている。
吸引式マイクロマウス「紫電改」が初優勝しただけでなく、決勝に4台の吸引式マイクロマウスが進出したのも史上初だ。吸引式マイクロマウスは、今後の注目技術となるだろうが、「姿勢制御ができないうちに吸引機構を搭載しても、苦労するだけ」と宇都宮さんは注意を促している。
ちなみに迷路上のA~Kが第二走行にチャレンジしたマイクロマウスがクラッシュしたポイントだ。FとHで多くのマイクロマウスが壁にぶつかっていた。
Fは、長い直線のあとに90度-180度の連続ターン。直線での距離が正確に計測できていないと、曲がりきることができない。姿勢を立て直さないうちに櫛歯エリアに入ると、Hでクラッシュする。
クラッシュの半数近い数がA~Eの直線で起きていることから、走行の基本は正確な直進性能にあることがわかる。
マイクロマウスの調整をする際に、16区画の直線を用意できる環境にある人ばかりではないだろう。2012年のマイクロマウス全日本大会で行われた小島宏一さんの講演「正確に走るためのパラメータ調整」が参考になるだろう。
【画像】24台中20台が選択したルート。半数がA~Eでクラッシュしている。
上位入賞者のロボットを動画で紹介する。

【動画】探索走行。
【動画】最速走行(5回目)。記録は6秒574。

【動画】探索走行。
【動画】最速走行(4回目)。記録は7秒195。

【動画】探索走行。
【動画】最速走行(4回目)。記録は7秒392。

【動画】探索走行。
【動画】最速走行(5回目)。記録は07秒393。

【動画】探索走行。
【動画】最速走行(5回目)。記録は00:07:555。

【動画】探索走行。
【動画】最速走行(3回目)。記録は7秒717。
加速減速や旋回などの比較を容易に見ることができて面白い発見があるでしょう。
「マイクロマウスクラシック競技」レポート
吸引式マイクロマウス「紫電改」、6秒574。宇都宮正和氏が初優勝!
フレッシュマンクラスに104台、エキスパートクラスに62台のエントリーがあった。昨年度よりもエキスパートクラス出場台数が減ったのは、ハーフサイズクラスのフレッシュマンに移った参加者が多いためだろう。吸引式マイクロマウスが史上初の優勝。1位「紫電改」、2位「ハセシュマウス ver.3.0」がともに吸引機構を搭載している。他に2台の吸引式マイクロマウスが決勝進出を果たした。
迷路図
エキスパートクラス予選でゴールに到達したのが39台(62.9%)、第2走行成功が31台(50.0%)だった。
【画像】予選迷路。西回り56歩23折(赤)、50歩33折(橙)、 南回り50歩23折(青)
【画像】予選風景。
決勝出場権を得たのは12秒台で走行したマウスまで22台。地区大会でシード権を得たマウスを合わせて30台と審査員特別枠1台が決勝迷路に挑んだ。決勝は28台(90.3%)がゴールに到達。第2走行は24台(77.4%)が成功した。
【画像】決勝迷路。西回り104歩27折(赤)、 南回り110歩53折(橙)、110歩39折(青)
【画像】決勝風景。
上位入賞者の走行
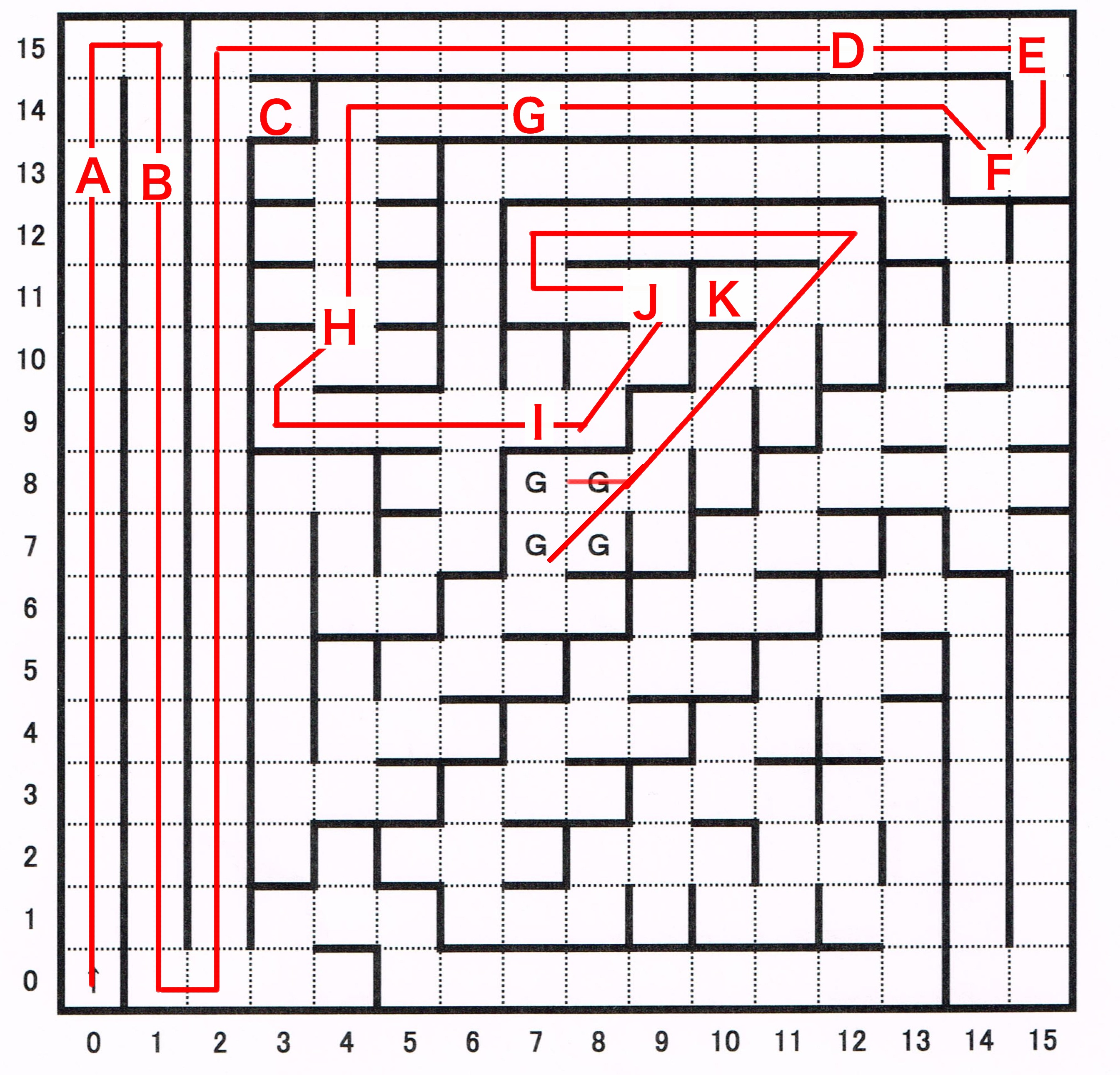
マイクロマウス競技の面白さのひとつに、自分のロボットの特性に合わせた最短ルートを選ぶ賢さがある。今回は、第2走行を成功した24台中20台が下記のルートを選んだ。歩数でいえば、明らかにこれが最短ルートとなる。そういう意味では、今回の迷路は経路の選択肢が限られていた。最短経路は、マイクロマウスが迷路を走行するうえで必要な制御技術を全て備えていないと、クリアできないルートだった。5回のチャレンジを全て成功させたのは、優勝した紫電改とDAI-WAN(Wu,Wen-Chi / Shih,Kai-Hsiang /Lunghwa University of Science and Technology)だけだった。
今大会で初優勝した宇都宮さんは、大学生時代から1区画内の姿勢制御に拘りをもっていたことが知られている。
吸引式マイクロマウス「紫電改」が初優勝しただけでなく、決勝に4台の吸引式マイクロマウスが進出したのも史上初だ。吸引式マイクロマウスは、今後の注目技術となるだろうが、「姿勢制御ができないうちに吸引機構を搭載しても、苦労するだけ」と宇都宮さんは注意を促している。
ちなみに迷路上のA~Kが第二走行にチャレンジしたマイクロマウスがクラッシュしたポイントだ。FとHで多くのマイクロマウスが壁にぶつかっていた。
Fは、長い直線のあとに90度-180度の連続ターン。直線での距離が正確に計測できていないと、曲がりきることができない。姿勢を立て直さないうちに櫛歯エリアに入ると、Hでクラッシュする。
クラッシュの半数近い数がA~Eの直線で起きていることから、走行の基本は正確な直進性能にあることがわかる。
マイクロマウスの調整をする際に、16区画の直線を用意できる環境にある人ばかりではないだろう。2012年のマイクロマウス全日本大会で行われた小島宏一さんの講演「正確に走るためのパラメータ調整」が参考になるだろう。
【画像】24台中20台が選択したルート。半数がA~Eでクラッシュしている。
上位入賞者のロボットを動画で紹介する。
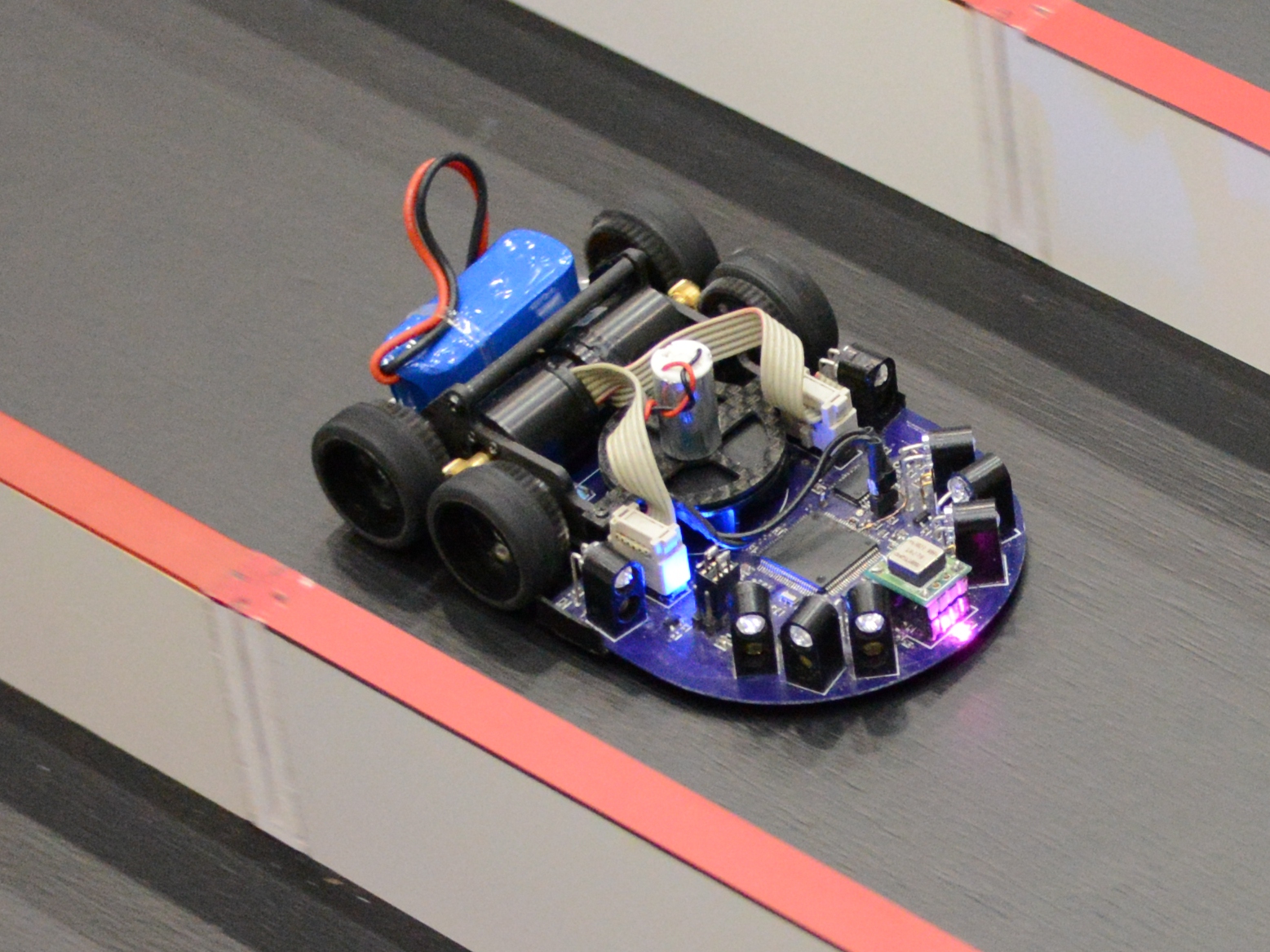
1位:紫電改(宇都宮 正和氏)
【動画】探索走行。
【動画】最速走行(5回目)。記録は6秒574。
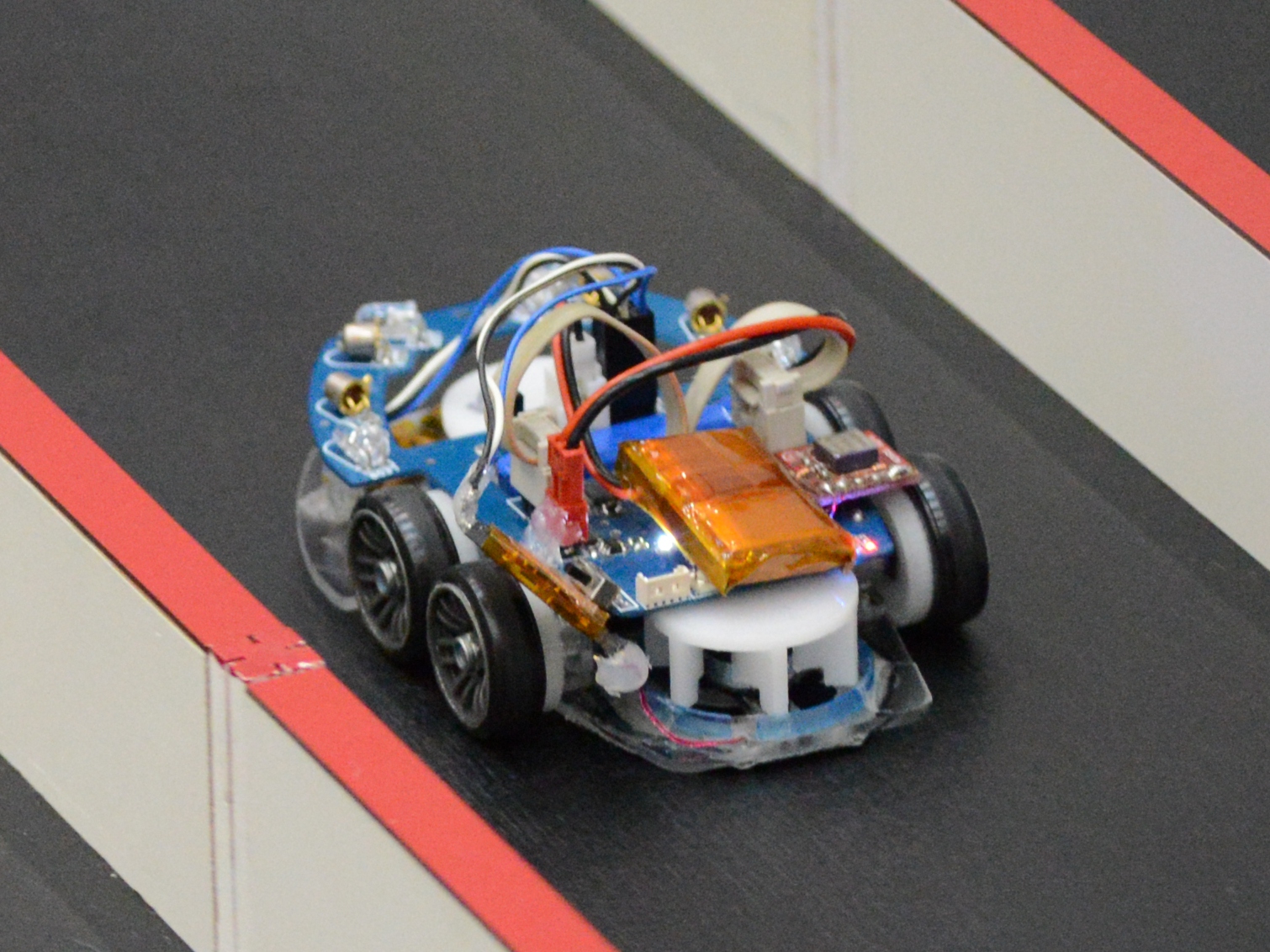
2位:ハセシュマウス ver.3.0(長谷川 峻氏/東京理科大学 Mice)
【動画】探索走行。
【動画】最速走行(4回目)。記録は7秒195。
3位:Dao-Hu(Ho,Tsung-Chun氏、Chen,Chao-Wei氏/Lunghwa University of Science and Technol)
【動画】探索走行。
【動画】最速走行(4回目)。記録は7秒392。
4位:Cobalt(平松 直人氏/東京理科大学 Mice)
【動画】探索走行。
【動画】最速走行(5回目)。記録は07秒393。
5位:Min7(Ng Beng Kiat氏/Ngee Ann Poly)
【動画】探索走行。
【動画】最速走行(5回目)。記録は00:07:555。
6位:Diu-Gow(CAI,XIN-HAN氏、WU,ZHAO-YI氏/Lunghwa University of Science and Technology)
【動画】探索走行。
【動画】最速走行(3回目)。記録は7秒717。
走行比較
優勝した「紫電改」と2位の「ハセシュウマウスver3.0」を同時再生する動画を作成しました。加速減速や旋回などの比較を容易に見ることができて面白い発見があるでしょう。