言語
NTFトップ > マイクロマウス > マイクロマウス2014 > 大会レポート > ロボトレース競技レポート
平井 雅尊氏が圧倒的な速さで連覇を達成。
オムニホイールや画像トレース、二足歩行ロボットなど新しいチャレンジのトレーサーが目立った。
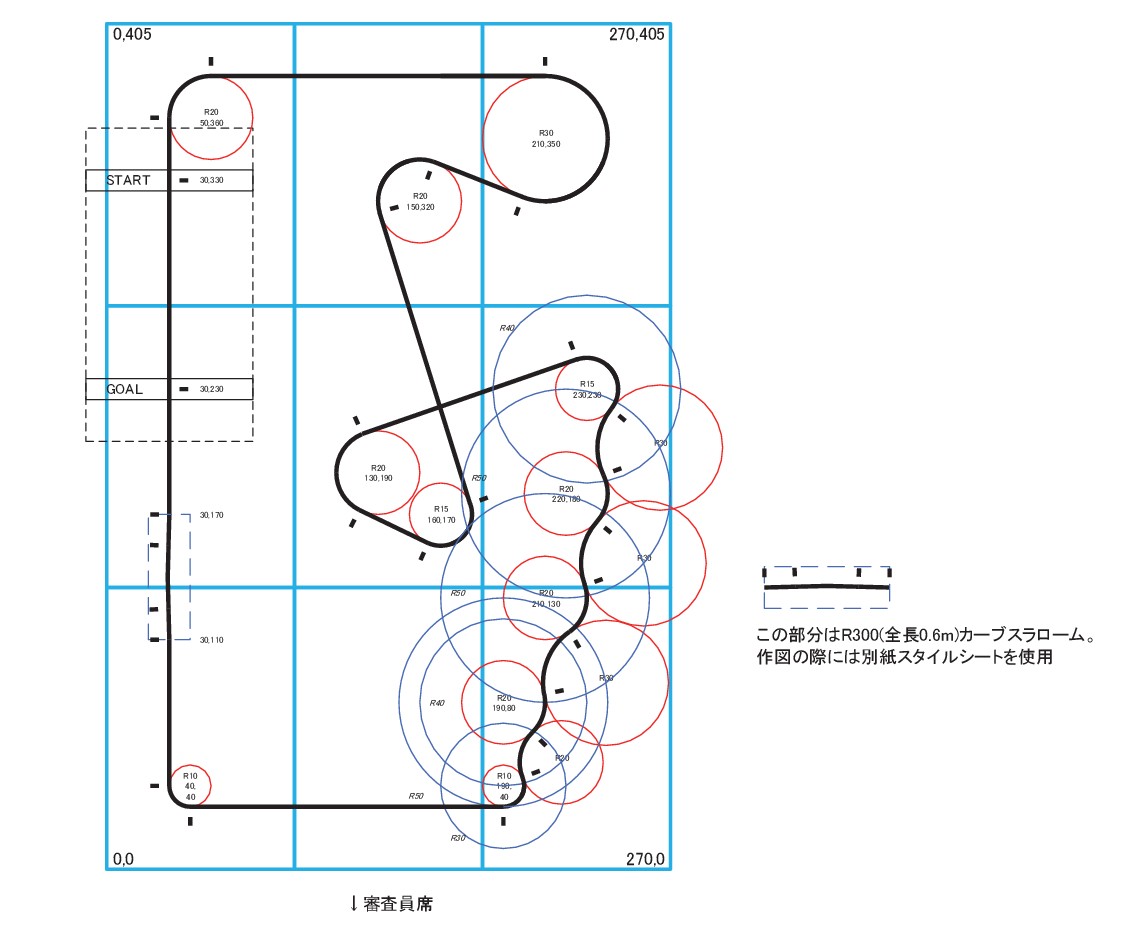
【画像】予選コース。全長14.8m

【画像】予選風景。
決勝に進んだのは、予選タイム10秒314までの機体と審査員特別枠の4台、計32台。
27台(84.7%)が完走した。
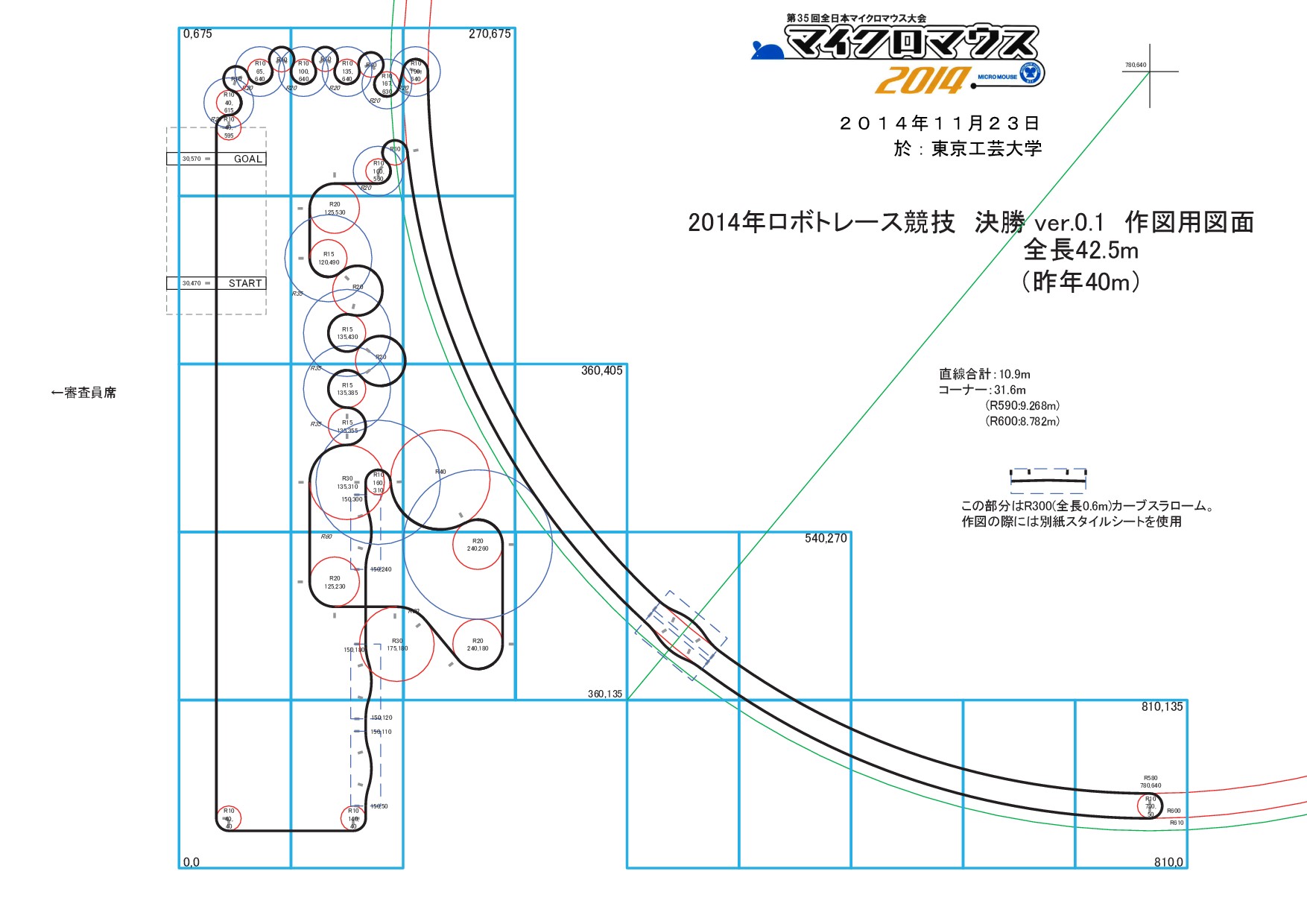
【画像】決勝コース。全長31.6m
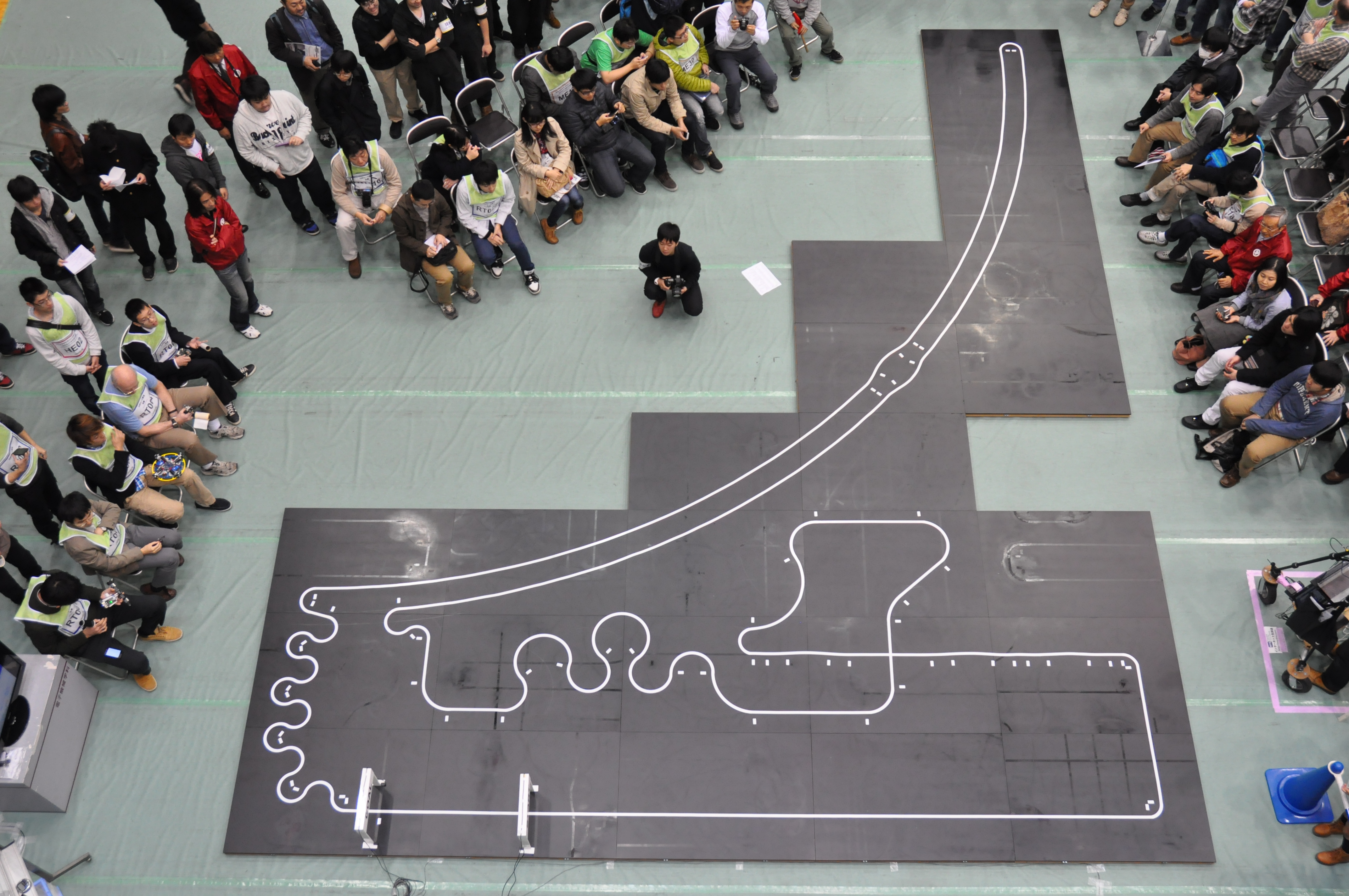
【画像】決勝風景。
赤枠で囲ってある部分が、1つ目のポイントだ。R300の緩いスラロームの間に短い直線が挟まっている。ここを直線のように走ってしまうと、A地点でコースアウトすることになる。
決勝では36回のコースアウトシーンがあったが、そのうちの11回がA地点だった。速度を落として安全に走行すると、速く走ることができない。
R600の長大なコーナーも直線と誤認識しやすい。直線のつもりスピードを上げると、コースアウトしてしまう。
優勝した「CartisX04」は、直線ではないが、直線に近い長大なコーナーを判定しているという。直線速度の7割程度の速度で走行したそうだ。
平井氏は、「ロボトレース競技は、課題として想定できても動作テストができない場合が多い」という。本番で結果を残すために、「こんなこともあろうかと」という姿勢でソフト開発をしているそうだ。
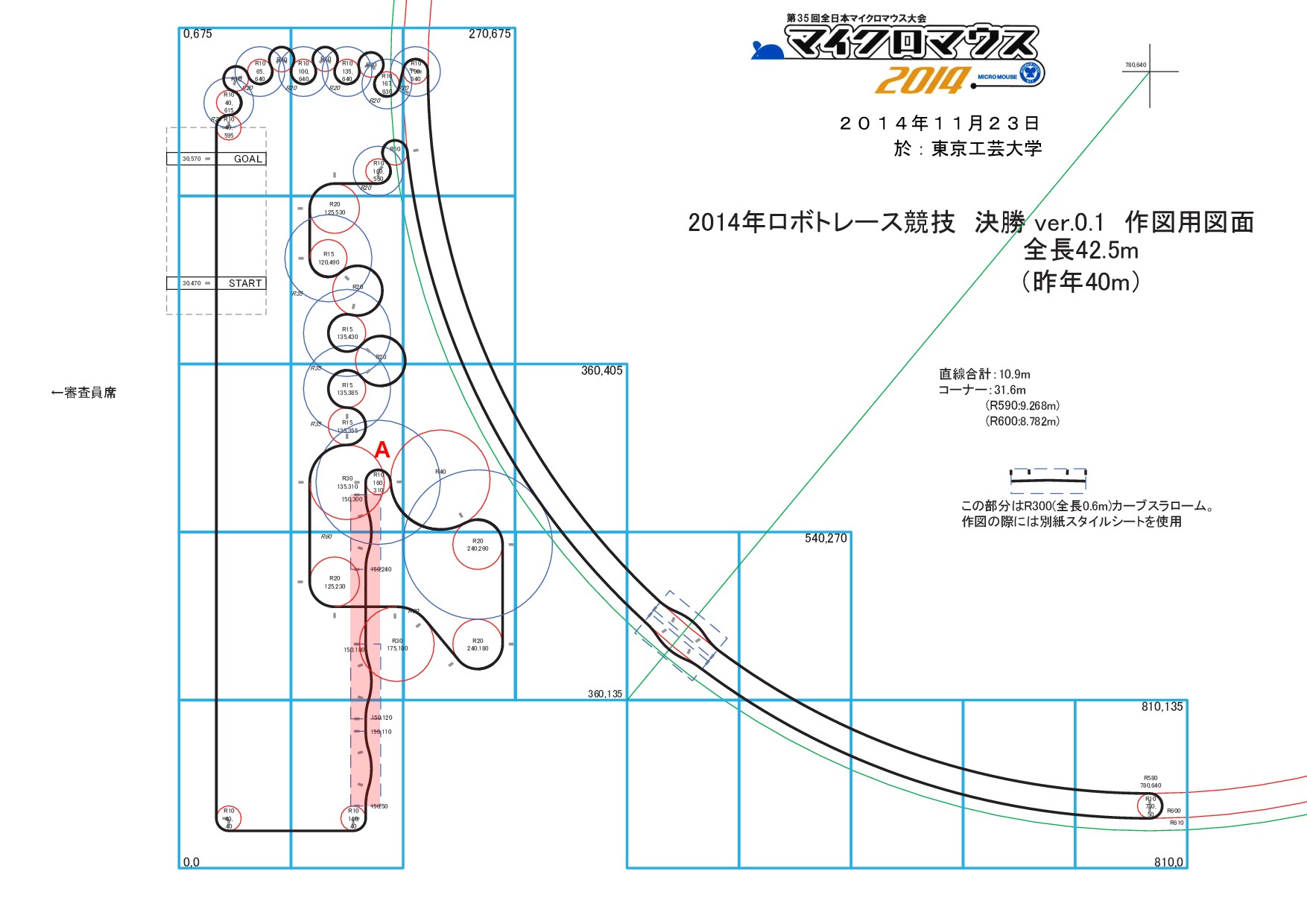
【画像】赤枠部分がカーブスラロームと直線で構成されているエリア

【動画】探索走行。記録は24秒327
【動画】最速走行(2回目)。記録は16秒512
【動画】最速走行(3回目)。記録は18秒577
【動画】最速走行(3回目)。記録は19秒364

【動画】最速走行(2回目)。記録は20秒084
【動画】最速走行(3回目)。記録は20秒433
【動画】最速走行(3回目)。記録は21秒143
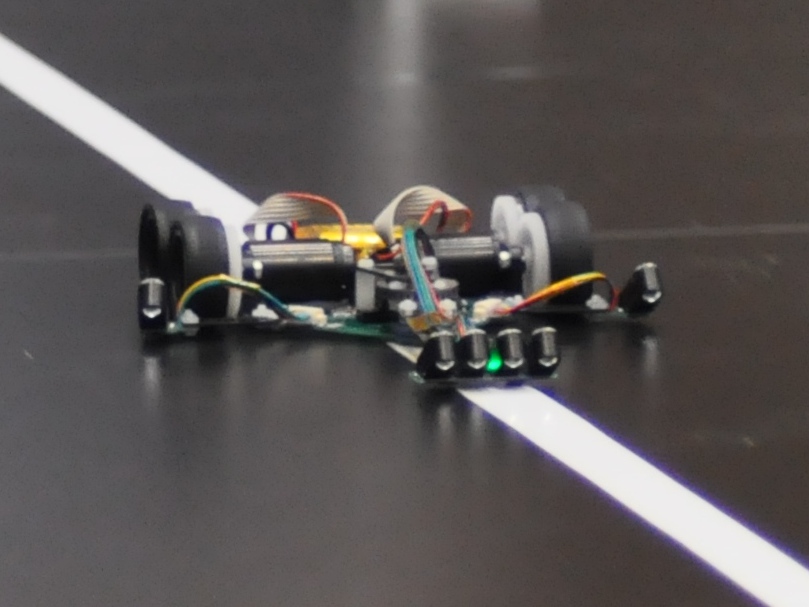
「錦試式」(寺崎 清氏/アニキと愉快な仲間たち)はニューテクノロジー賞を受賞しました。カーブを曲がるときにマーカーを使わずに角速度から経路を測定する新しい手法を取り入れた点が評価された。
【動画】マイクロマウス大会2014 ロボトレース ニューテクノロジー賞「錦試式」
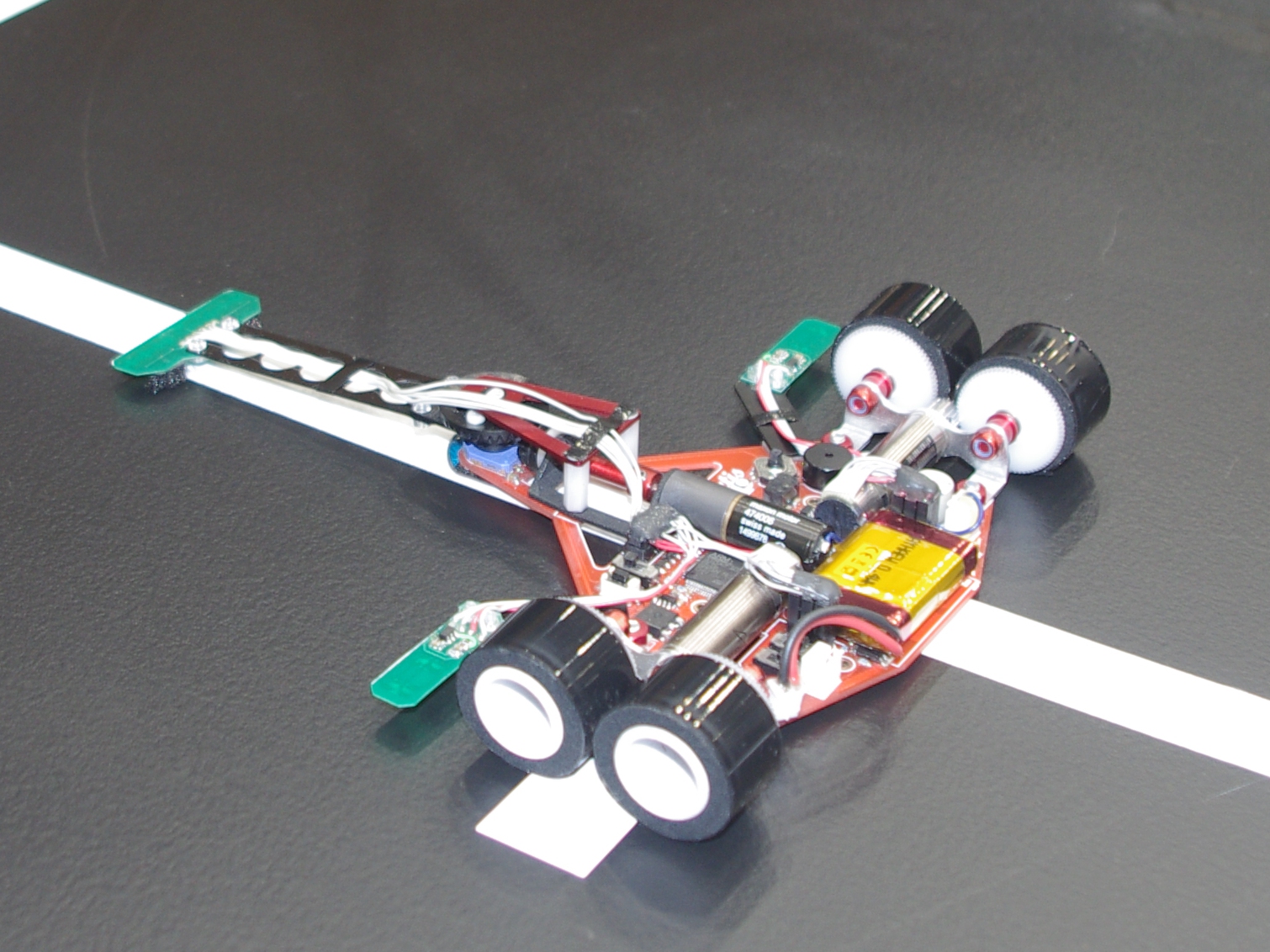
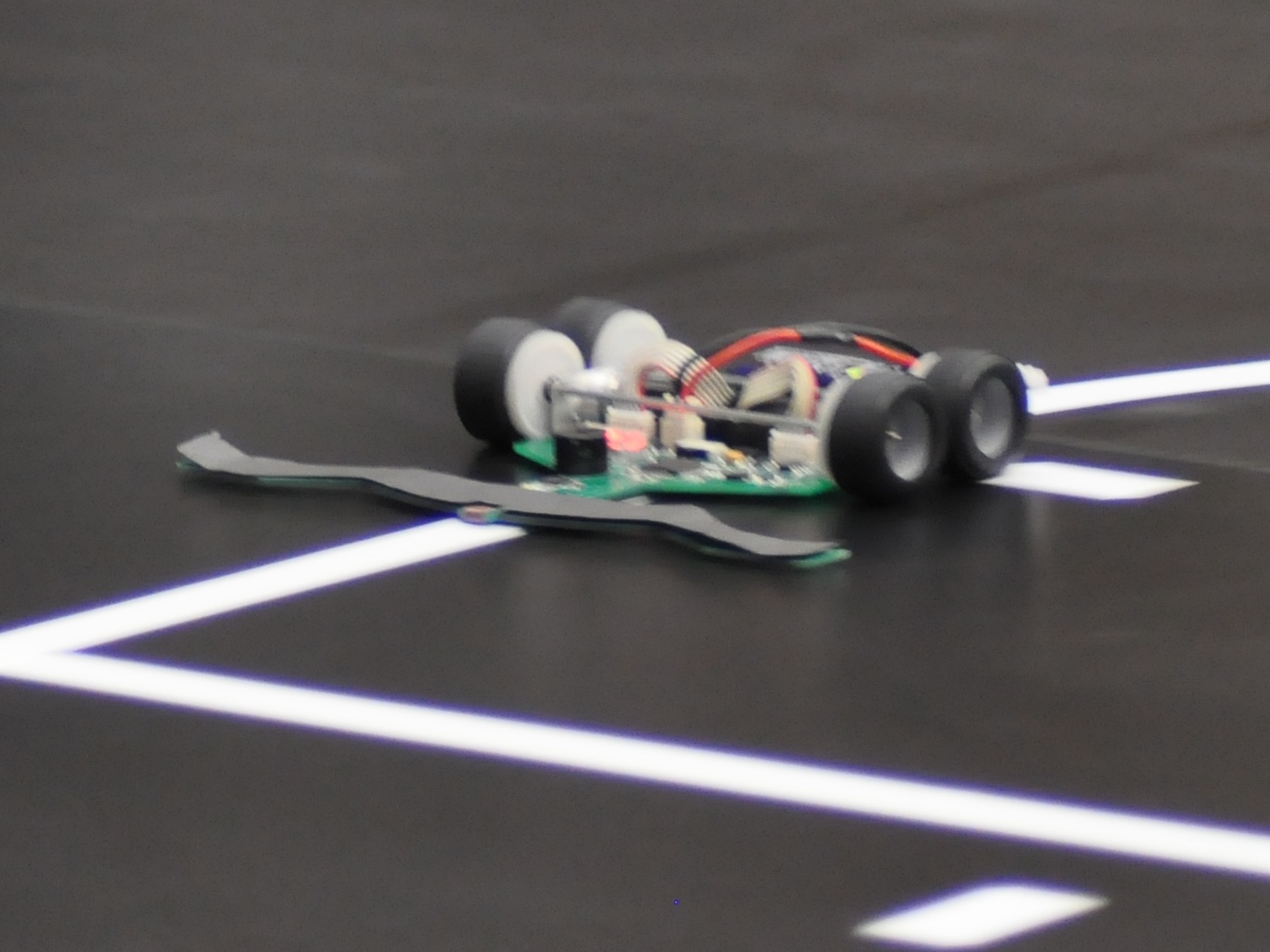
「Jehu 3」(David Otten氏/Massachusetts Institute of Technolody)は、四輪トレーサーにPSDセンサを搭載。ユニークなロボットを作っている点が評価され特別賞が贈られた。
【動画】マイクロマウス大会2014 ロボトレース 特別賞「Jehu 3」
「ロボトレース競技」レポート
平井 雅尊氏が2位に2秒以上の差をつけて連覇
予選に出場したのは106台。ゴールに到達したのが74台(69.8%)だった。決勝には、特別枠を含め32台が出走。27台(84.3%)が完走した。平井 雅尊氏が圧倒的な速さで連覇を達成。
オムニホイールや画像トレース、二足歩行ロボットなど新しいチャレンジのトレーサーが目立った。
コース図
【画像】予選コース。全長14.8m
【画像】予選風景。
決勝に進んだのは、予選タイム10秒314までの機体と審査員特別枠の4台、計32台。
27台(84.7%)が完走した。
【画像】決勝コース。全長31.6m
【画像】決勝風景。
上位入賞者の走行
今年の決勝コースは、R300のカーブスラロームと短い直線で構成される区間と、R600の長い曲線が特徴だった。この両エリアをどう攻略するかでタイムが決まる。赤枠で囲ってある部分が、1つ目のポイントだ。R300の緩いスラロームの間に短い直線が挟まっている。ここを直線のように走ってしまうと、A地点でコースアウトすることになる。
決勝では36回のコースアウトシーンがあったが、そのうちの11回がA地点だった。速度を落として安全に走行すると、速く走ることができない。
R600の長大なコーナーも直線と誤認識しやすい。直線のつもりスピードを上げると、コースアウトしてしまう。
優勝した「CartisX04」は、直線ではないが、直線に近い長大なコーナーを判定しているという。直線速度の7割程度の速度で走行したそうだ。
平井氏は、「ロボトレース競技は、課題として想定できても動作テストができない場合が多い」という。本番で結果を残すために、「こんなこともあろうかと」という姿勢でソフト開発をしているそうだ。
【画像】赤枠部分がカーブスラロームと直線で構成されているエリア
1位:CartisX04(平井 雅尊氏/アニキと愉快な仲間たち)
【動画】探索走行。記録は24秒327
【動画】最速走行(2回目)。記録は16秒512
2位:Snail_II(Shih,Kai-Hsiang氏、 Cai,Yi-Zhan氏/Lunghwa University of Science and Technology)
【動画】最速走行(3回目)。記録は18秒577
3位:Dao-Huei(Ho,Tsung-Chun氏、Liao,Huan-Jie氏/Lunghwa University of Science and Technology)
【動画】最速走行(3回目)。記録は19秒364
4位:Diligent(meng weilin氏/Institute of Technical Education, Singapore)
【動画】最速走行(2回目)。記録は20秒084
5位:First Aim(小名川 翔氏/千葉県立船橋高等技術専門校)
【動画】最速走行(3回目)。記録は20秒433
6位:Ning3(Ng Beng Kiat氏/Ngee Ann Poly)
【動画】最速走行(3回目)。記録は21秒143
ニューテクノロジー賞
審査員特別枠で決勝に進んだロボットのうち2台を動画で紹介します。「錦試式」(寺崎 清氏/アニキと愉快な仲間たち)はニューテクノロジー賞を受賞しました。カーブを曲がるときにマーカーを使わずに角速度から経路を測定する新しい手法を取り入れた点が評価された。
【動画】マイクロマウス大会2014 ロボトレース ニューテクノロジー賞「錦試式」
「Jehu 3」(David Otten氏/Massachusetts Institute of Technolody)は、四輪トレーサーにPSDセンサを搭載。ユニークなロボットを作っている点が評価され特別賞が贈られた。
【動画】マイクロマウス大会2014 ロボトレース 特別賞「Jehu 3」