




















ロボトレース競技レポート
Lunghwa University of Science and Technologyがワンツーフィニッシュ

|
|
【画像1】第32回マイクロマウス全日本大会 ロボトレース競技 |
ロボトレース競技には、95台がエントリーした。上位常連マシンが第2走行に苦しむ中、LungHwa University of Science and Technologyの2台がワンツーフィニッシュを飾った。
■直線と大きな円弧攻略が優勝への鍵
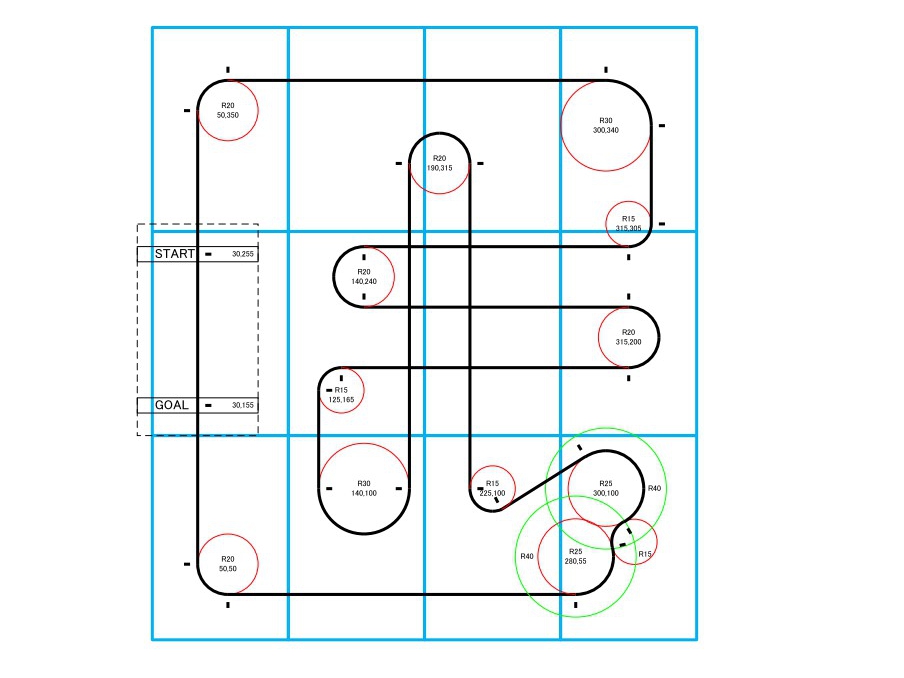
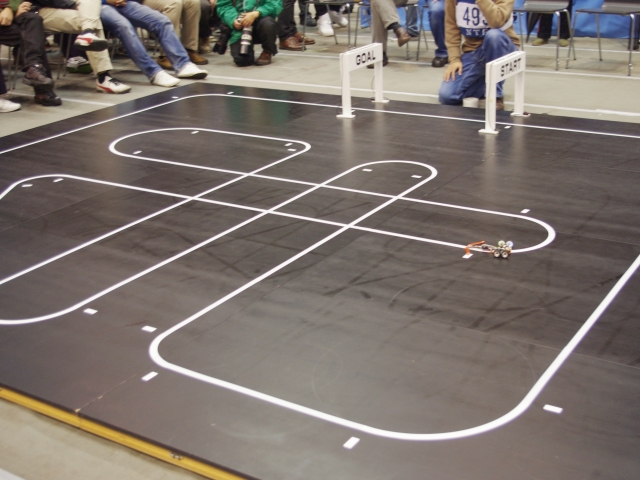
今年の予選コースは全長25.6m(画像2)。出走したのは87台で、そのうち52台(59.7%)がゴールした。第2走行に成功したのは43台(49.4%)だった。決勝進出権は29秒以内でゴールに到達した40台が得た。
|

|
|
【画像2】2011年ロボトレース競技予選コース。全長25.6m |
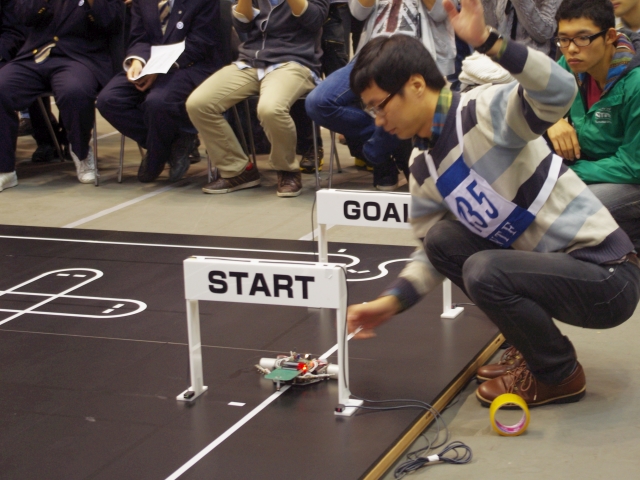
【画像3】予選競技風景 |
ロボトレースは、学校単位で参加しているケースが多い。大学生や高校生の参加だけでなく、中学生もいる。学生達は、互いに情報交換や技術交換をしロボトレーサーを作り込むことが多いので、似た機構のマシンができる傾向にある。そこで、予選上位に同じ機構のロボとレーサーがあった場合、審査員の審査により決勝に進むロボトレーサーが決定される(画像4)。そうした審査を経て、今回は決勝に34台が出場した(画像5)。

|

|
|
【画像4】ロボトレース車検 |
【画像5】ロボトレース決勝進出ロボット |
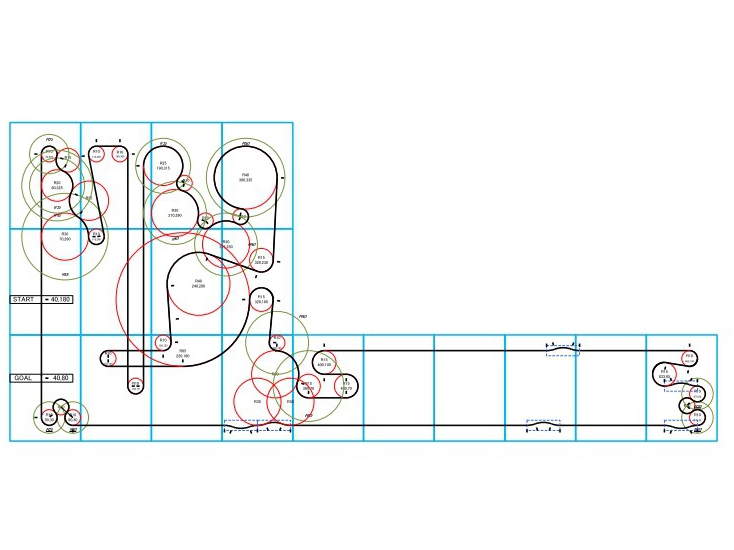
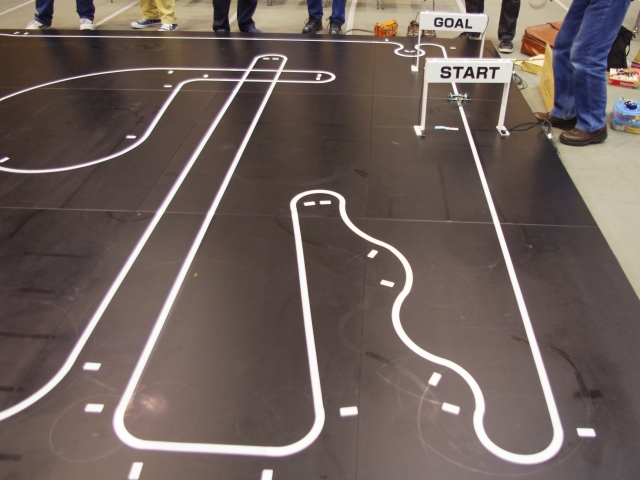
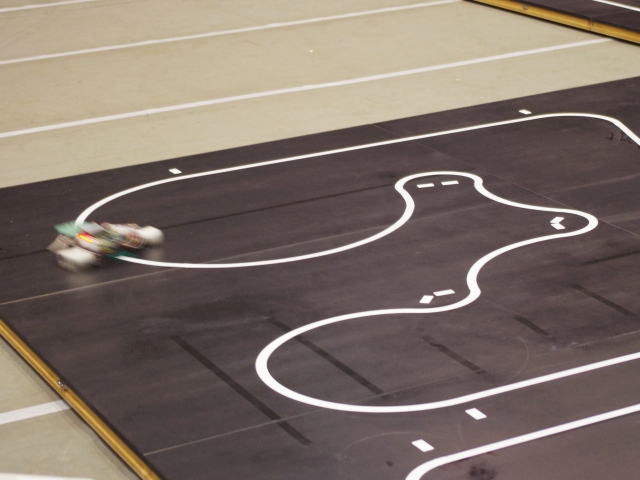
決勝は、大きな円弧と直線が組み合わさった全長40.9mのコースだった。持ち時間3分で、これだけ長いコースを3回完走するのは、高レベルを要求される(画像6)。このコースをゴールしたロボトレーサーは25台(73.5%)、第2走行には12台(35.2%)が成功した。3回の完走に成功したのは、わずか5台だった。
|

|
|
【画像6】2011年ロボトレース競技決勝コース。全長40.9m |
【画像7】ロボトレース決勝風景 |
それでは、上位のロボトレーサーがどのように、コースを攻略したのか動画で紹介しよう。
3位に入賞したのは、昨年度優勝の「Village stone(村石亘氏/黒い箱)」だ。第1走行が28秒755。2回目を26秒094、3回目に24秒826と走るたびに自己記録を更新した。
|
【動画】「Village stone」1回目の走行。記録は28秒755 |
|
【動画】「Village stone」は3回目に、24秒826と記録を縮めた。 |

|
|
【画像8】3位入賞の村石 亘氏(黒い箱) |
2位は、昨年3位だった「NTD(Lin,Chih-Yuan氏/Lunghwa University of Science and Technology)」。NTDは第1走行は40秒003と速度を抑えて走っている。走りながらコース上のマーカーを記憶し、第2走行ではマーカーの位置と車輪の角度を制御しスピードを上げて疾走する。2回目の記録は23秒157、3回目に22秒110と縮めた。
|
【動画】「NTD」1回目の走行。記録は40秒003。カメラがマシンを追いかけていなくて申し訳ない。 |
|
【動画】「NTD」3回目の最速走行。直線に入ると加速しているのがわかる。記録は22秒110 |
|
|
【画像9】2位入賞のLin,Chih-Yuan氏(Lunghwa University of Science and Technology) |
優勝は、「Li-Zai(Shih-Wei Chao氏/LungHwa University of Science and Technology)で、2位のNTDと同じようにマーカーを記憶して走行していた。第1走行は、「NTD」より10秒以上かけた52秒749だったが、第2走行で22秒320、最終走行で21秒838を記録し優勝した。
Shih-Wei Chao氏は、去年の全日本大会に初出場し決勝に進出している。今年は、センサーを赤外線センサにした機体を作り、ソフトも練り込んできたという。
|
【動画】「Li-Zai」1回目の走行。記録は52秒749。 |
|
【動画】「Li-Zai」の3回目の最速走行。記録は21秒838。1回目の走行と走り方が違うのに注目。 |

|

|
|
【画像10】優勝したShih-Wei Chao氏(LungHwa University of Science and Technology) |
【画像11】優勝マシン「Li-Zai」。サイズは、全長130mm、幅140mm、高さは28mm。重量28g |
「Village stone」と「Li-Zai」の走りを比べると、ロボトレーサーの制御方法が違うことがよくわかる。
「Village stone」は、1回目と3回目を比べても走り方に違いはない。しかし、「Li-Zai」は1回目に覚えたマーカーを活用し、直線で速度を上げ、コーナー前では確実に減速してカーブを曲がっている。緩急のついた走りで、コースをクリアしているのが見て取れる。
今年のコースは、長い直線と急カーブの組み合わせ、大きな円弧と小さな円弧の組み合わせが特徴だ。スピードを上げて直線を走った後に小さな円弧の連続に入るのは、確実な減速制御が求められる。また緩やかな円弧は、直線と間違えやすいため制御が難しいそうだ。
「Li-Zai」は、80度以上の円弧は直線とみなして走っているそうだ。ジャイロで姿勢制御をし、コースアウトしないようにプログラムしているという。
「Village stone」が、このように長く複雑なコースを、3位入賞する速度で確実に白線を検知し持ち時間の3分で3回の走行にしたというのは素晴らしいと思う。安定した機体と確実にトレースするプログラムの作りこみができている。
しかしながら、委員会がロボトレースに期待しているのは、マーカーを活用して自己位置推定をし、知的に機体を制御して疾走するロボトレーサーだ。国内選手では、「kuro(西尾太志/福井大学 からくり工房)や、「風兎2011LT(山口辰久氏/京都大学機械研究会OB・OG会)が実現していた。
「風兎2011LT」は、市販されている教材用の車型ロボット「Beauto Chaser」を改造したマシンだ。5000円台で購入できる入門用キットのため、モーターなどの機体性能は上位マシンと比較すると弱い。しかしながら、センサを増設しソフトを作りこむことで、安価に製作しているマシンであっても、委員会がロボトレーサーに期待する知的な制御が可能であることを示した。
|
【動画】kuro(西尾太志/福井大学 からくり工房)第1走行。記録は50秒729。 |
|
【動画】kuro(西尾太志/福井大学 からくり工房)第2走行。記録は34秒158。 |
|
【動画】「風兎2011LT(山口辰久氏/京都大学機械研究会OB・OG会)の1回目の走行。記録は1分11秒114 |
|
【動画】「風兎2011LT(山口辰久氏/京都大学機械研究会OB・OG会)の2回目走行。57秒107で完走した。残念ながらタイムアップで公式記録とはならなかった。 |
次世代ロボトレーサー登場への期待
実は、ロボトレース競技は、コースを忠実になぞって走ることを求めていない。逆に、上級者にはコースをロボットが解釈し、最短距離を計算して走ることを望んでいる。
ロボトレースは、ルールに定められているように、機体の一部がコース上にあればコースアウトとはならない。つまり緩やかなS字カーブや蛸壺カーブの連続は、コースを忠実になぞるよりも、状況に応じて直進したり、コーナーの先にあるコースを推定し最適なライン取りで走れば、タイムを縮めることができるのだ。
例えば、今回のコースで言えば、長い直線の途中にある小さなカーブを直進する走りだ。「Li-Zai」も「NTD」もこのカーブのところでスピードを落としていることが、動画でも見て取れる。ここを直進していれば、記録はもっと短縮されるだろう。
第29回大会(2008年)にルール改正され、吸引型ロボトレーサーが禁止になって以来、委員会は、より知的なロボトレーサーが登場することを期待している。
例えるなら、F1ドライバーが、自分のテクニックと車体性能に応じてヘアピンカーブを攻めるように、ロボットが独自にライン取りをして疾走する……。そんなロボトレーサーを出現を待っているのだ。
大会の記録には上がってこないが、次世代ロボトレーサーへのチャレンジは進んでいる。どの世界でも同じだが、パイオニアとしてまだ誰も実現していない技術にチャレンジする時、結果を出すまでには時間がかかる。既得している技術だけで上位を目指すこともできるが、敢えて新しい技術に挑んでいる参加者がいる。
これまで、競技会を牽引してきた参加者や、地区大会で期待されていた参加者が、果敢に新しい技術にチャレンジを続けている。
次の大会では、新世代ロボトレーサーの走りを見ることができるだろうか?
■競技風景

|

|
|
【画像12・13】中学生の参加者もいた |
|

|
|
|
【画像14・15】予選コースは、「初心者や学生が完走できる難易度」を想定しているという |
|
|
|
|
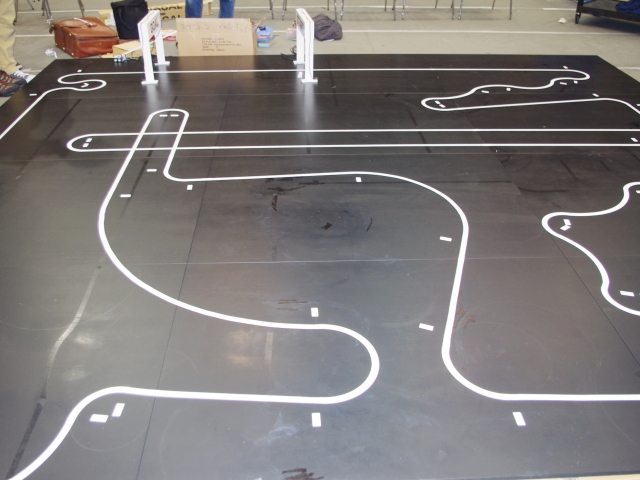
【画像16・17】決勝コースは、細かいカーブの連続や、大きな円弧が入り距離も長くなっている |
|

|
|
|
【画像18・19】スタートして直後のR10や、長いストレート後のR10でコースアウトするマシンが多かった |
|

|
|
|
【画像20・21】長い直線コースの途中には、小さなカーブがある。ここを直進するロボトレーサーを見たい |
|

|

|
|
【画像22・23】ボランティアスタッフがコースを設営。走行前には手分けしてコースを拭いていた |
|