




















「マイクロマウスクラシック競技」レポート
~3秒921でゴールへ到達。Kiat氏が予選、決勝ともに制覇。

|
|
【画像1】第32回全日本マイクロマウス大会 開会式風景 |
第32回全日本マイクロマウス大会は、フレッシュマンクラス99台、エキスパートクラスに82台のエントリーがあった。戦後最大の円高という事情があり海外からのエントリーが少ないにもかかわらず、国内の若手技術者や学生の参加が多く活気あふれる大会となった。
今回より、フレッシュマンに予選が導入された。大学生や高校生が出場する中で、初出場の中学生3年生若杉俊哉君(渋谷教育学園幕張中学校電気部)が、堂々の3位に入賞。若手の裾野が確実に広がりを感じる大会だった。
エキスパートクラスで優勝したMin7.1(Ng Beng Kiat氏/Ngee Ann Polytechnic)の記録は3秒921。とうとう、4秒の壁を破るマウスが登場した。
■エキスパートクラス
予選に出場したのは、71台。ゴールに到達したのが52台(73%)、第2走行を完走したのが37台(52%)だった。
予選もMin7.1が4秒109でトップ通過。12位までが昨年度優勝と同レベルの5秒台、17位までが10秒を切るタイムでゴールしている。今大会は14秒以内でゴールしたマシンが決勝に進出した。
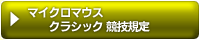
予選と決勝の迷路は次のとおりだ。
|
|
|
【画像2】予選迷路。西回り 56歩38折、南回り 56歩38折 |
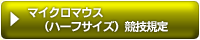
【画像3】決勝迷路。西回り 54歩32折、南回り 56歩22折 |
委員会が配布した決勝迷路図に記載されている最短コース例は、上記の画像3となる。しかし、今大会の上位3台は、全員違うコースを選択していた。
上位ロボットの走りを動画で紹介しよう。
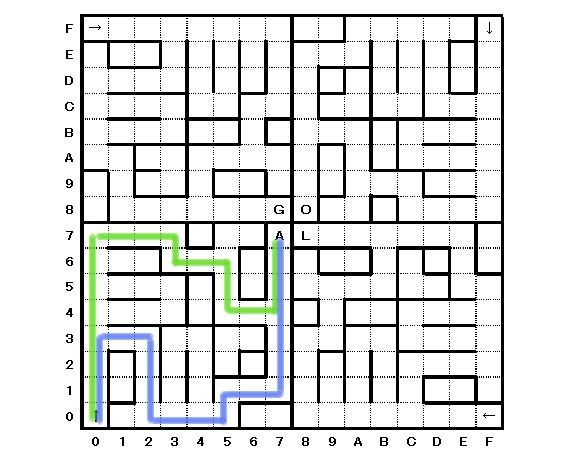
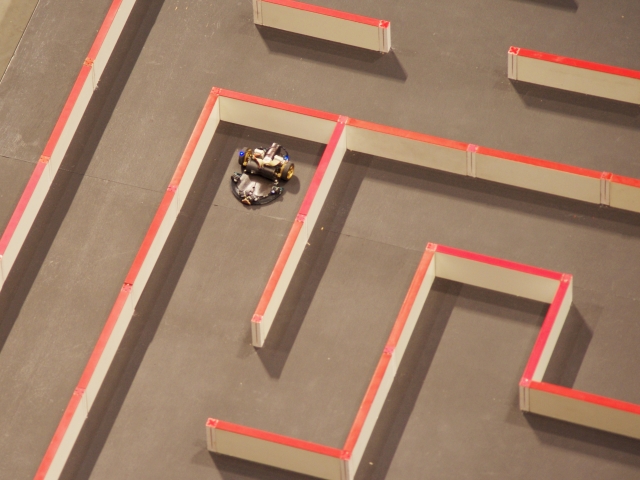
3位の「雪風4(中島史敬氏)」が選択したのは、54歩34折で西回り最短を少しアレンジしたコースだった(画像4)。単純にカウントすると折が多いが、ゴール手前をナナメに突っ切れば、上記の西回りよりも時間が短縮できる。
スタート地点に戻る時は、歩数が少ない参考例コースを選んでいる。(以後、走行データの迷路図は、動画の向きに合わせて掲載する)
|
|
|
【画像4】「雪風4(中島史敬氏)」の走行コース。記録は 4秒770で3位 |
|
【動画】「雪風4」の探索走行。 |
|
【動画】「雪風4」の最速走行。 |

|
|
【画像5】3位入賞の中島史敬氏 |
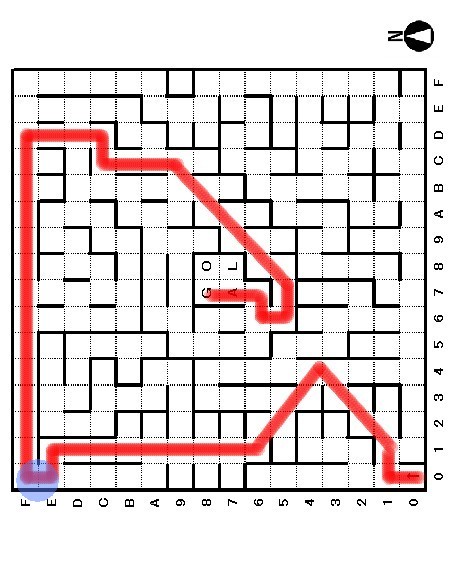
2位の「Tetra(加藤雄資氏)」は、北辺を雪風4よりも長く直進し、56歩32折のコースを選
んだ。スラロームが減った分、スピードを落とさずに走れるわけだ。
「今年から社会人になり、マウス開発の時間が思うように取れない」と、Tetraの基本設計は昨年優勝した時のままだという。と言いつつ、Tetraは、探索走行を終えた後オートスタートで第2走行にチャレンジした。
マウスは、タイヤに微細なゴミが付着しても、走行距離の計測に誤差が出るため、参加者は1走毎にタイヤを念入りに清掃してから、スタートするのが常だ。迷路内をくまなく探索した後に、高速で迷路を走り抜けるのは技術的にも困難だ。それにもかかわらず、「Tetra」は2回目を4秒681でゴールした。
3回目4回目を画像6の青丸部分で壁にひっかかりリタイアした。ここは、直線でスピードを出した後に左右に車体を振って、姿勢制御しなくてはならない難所だ。西回りを選んだマウスの多くが、ここでリタイヤしていた。
「Tetra」最終走行をわずかに速度を落としてチャレンジ。 4秒116で暫定1位に踊りでた。
|
|
【画像6】「Tetra(加藤雄資氏)」の走行コース。記録は4秒116で2位 |
|
【動画】「Tetra」の探索走行。そのままオートスタートで第2走行を行なっている。加藤氏は、自立賞も受賞した。 |
|
【動画】「Tetra」の最速走行。3・4回目は青丸まで1秒18で到達している。5回目は1秒20とスピードを調整していた。 |
|
|
【画像7】2位の加藤雄資氏 |
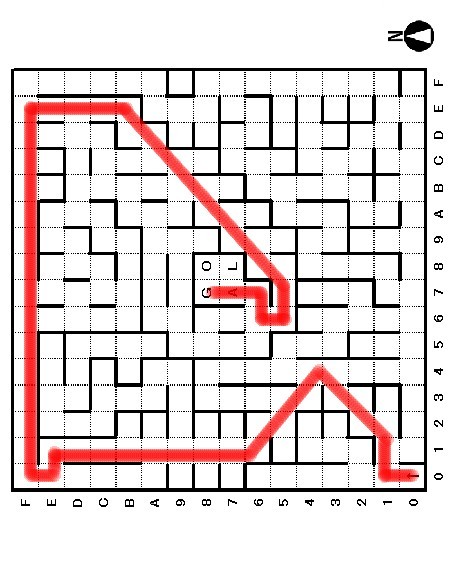
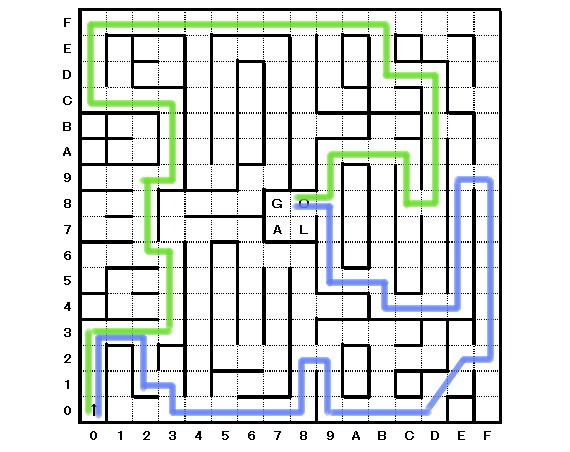
そして、優勝した「Min7.1(Ng Beng Kiat氏/Ngee Ann Polytechnic)」が走行したコースは、58歩32折でナナメ最短コースだった。
|
|
【画像8】「Min7.1(Ng Beng Kiat氏)」の走行コース。記録は3秒921 |
Min7.1は、 1分以上かけて迷路内をくまなく探索した後にゴールし、未探索部分を数カ所走ってから、スタート地点に戻っている。他のマウスが、まずゴールを目指しながら探索するのとは違う手法を取っているようだ。
|
【動画】「Min7.1」の探索走行。ゴールする前に迷路内をたんねんに探索している。 |
そして最短コースは、マップ(画像8)で示したように北辺をTetraよりも1区画長く走り、ゴール手前までナナメに一気に突っ走った。
予選を1位で通過したMin7.1は、決勝は最終出走となった。2回目の走行で4秒313を出して一気に暫定2位に踊り出た。
息を凝らして観客が見守る中、3回目の走行がスタート。4秒100でゴールしたマウスがスタート地点に戻ってくる時、モニターに近づいてTetraの記録と見比べていた。
この時点で、Min7.1の優勝は決定した。あとは、最速記録をどこまで縮めるかに期待がかかる。4回目も4秒100でゴール。
そして、最終走行。Min7.1が、史上初めて4秒の壁を破った瞬間、観客から大きなどよめきと拍手が沸いた。
|
【動画】「Min7.1」の3回目の走行。この時点で優勝が確定した。 |
|
【動画】5回目の走行で、4秒の壁を破り3秒921でゴール。スローモーション動画もお見逃しなく! |

|

|
|
【画像9】4秒を切ってゴール。両手を大きくあげて喜びを表したあと、観客にVサインを出すKiat氏 |
【画像10】第32回全日本マイクロマウス大会 マイクロマウスクラシック競技エキスパートクラス優勝。Ng Beng Kiat氏(Ngee Ann Polytechnic) |
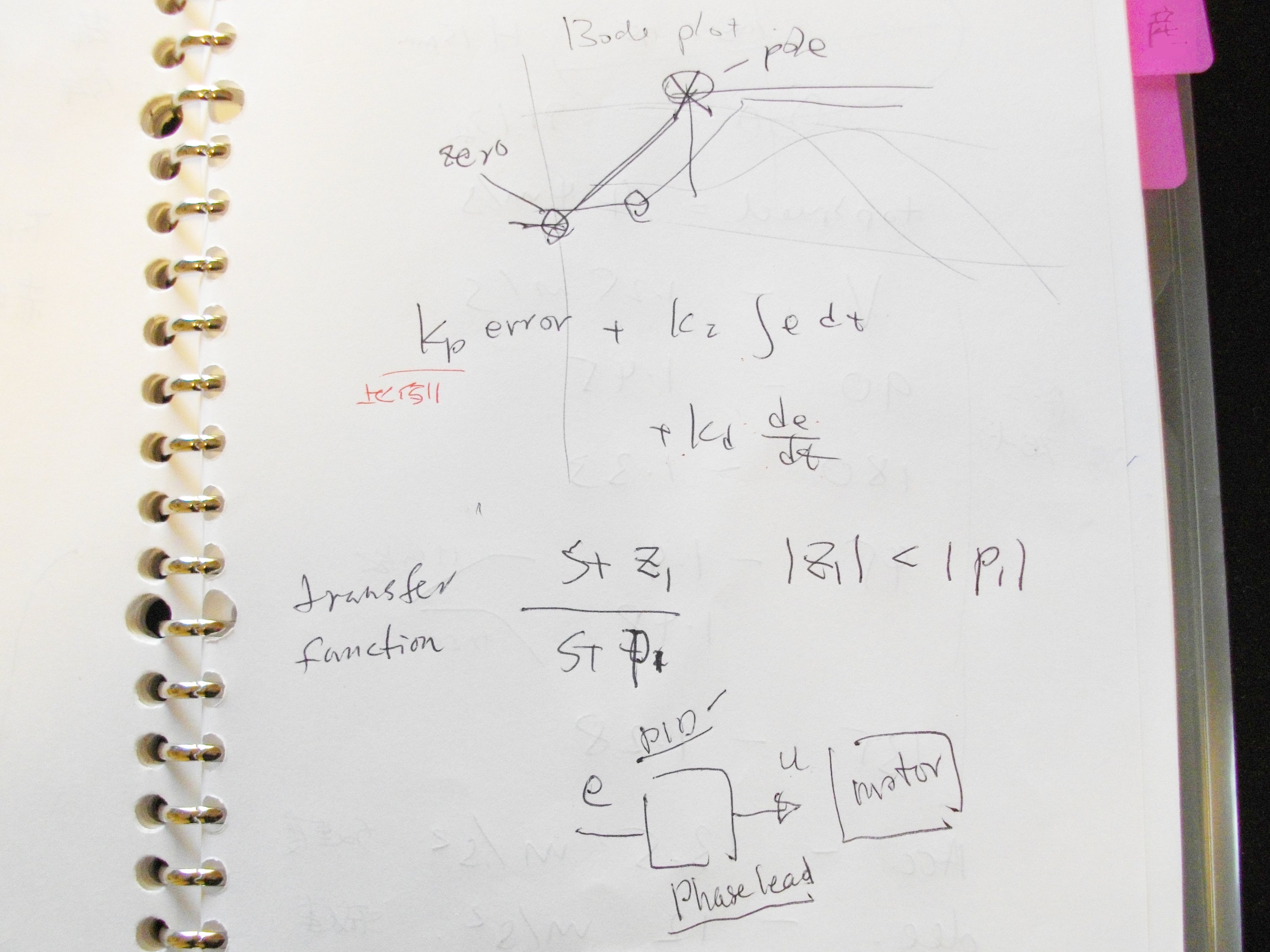
競技終了後、帰国子女の参加者に協力を依頼し、Kiat氏にインタビューを試みた。Kiat氏は、Min7.1をPhase-lead制御しているそうだ。ノートに図や数式を描いていただきながら、説明をしていただいたが、私には知識がないので理解できなかった。記事を読んでくださる皆様に申し訳ないと思う。
取材中にあっという間に参加者が集まり、みんなでノートを覗き込みながら話を聞いた。国内トップレベルの選手もそろっていたが、「Phase-lead制御を使っている」という人は見当たらなかった。
Kiat氏はPhase-lead制御のレクチャーをDavid Otten氏(Massachusetts Institute of Technology)から受けたそうだ。残念ながらOtten氏のサイトは見つけられなかったが、参加者のPeter Harrison氏がサイトに「Designing the motor controller」という記事を書いている。
毎年、海外から招待選手が来日しているが、彼らと積極的に技術交流をしている選手はこれまで多くなかった。今大会の予選は、上位8位までを海外勢が占めている。若手選手は、国際的な技術力を身につけるためにも、ノートとペンを持って、海外勢に話しかけて新しい情報を貪欲に得て欲しいと思う。
|

|
|
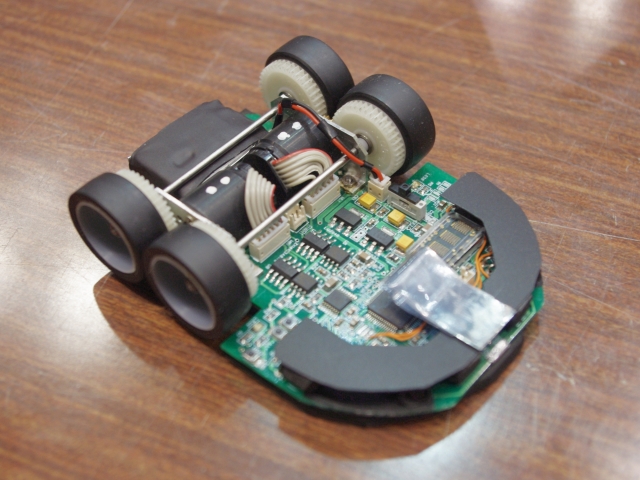
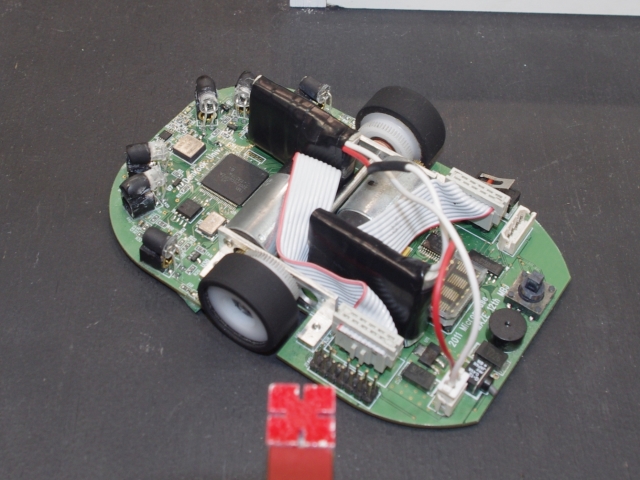
【画像11】クラッシック競技エキスパートクラス優勝「Min7.1」重量は91.13g。全長105mm、幅75mm、高さ15mm |
【画像12】取材中、参加者が集まってきてkiat氏を囲んで熱心に質問を始めた |
|
|
|
【画像13】Kiat氏が書いてくださったノート(1) |
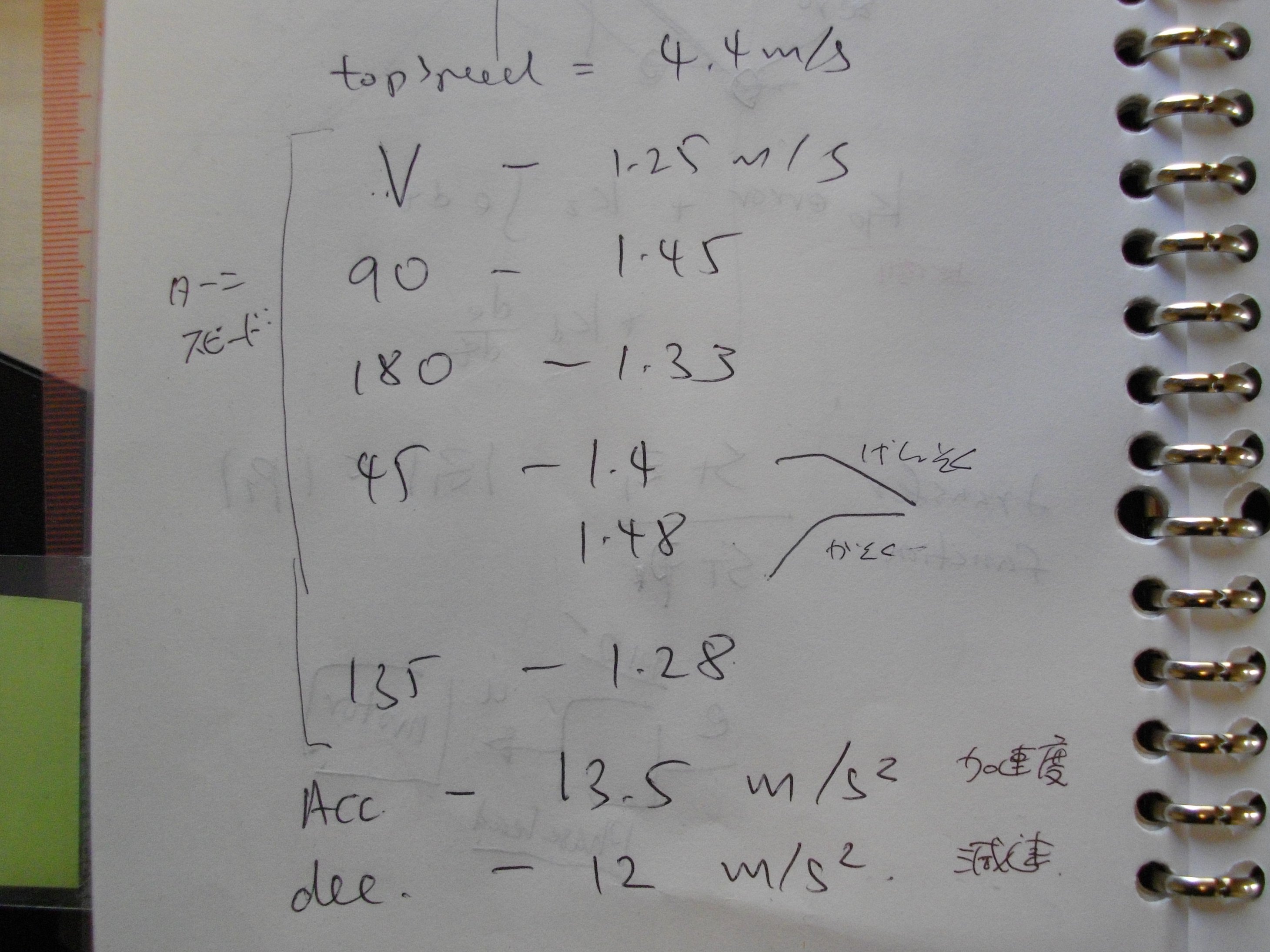
【画像14】Kiat氏が書いてくださったノート(2)。Min7.1のトップスピードとターンスピード、加速度、減速度(だと思われる) |
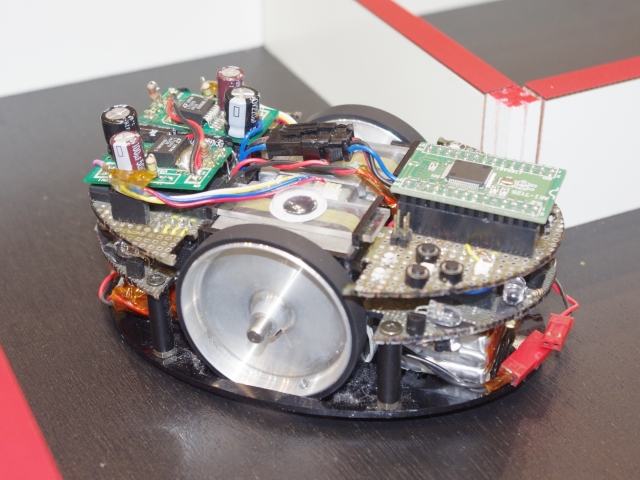
探索賞は「Tushi(CHANG,CHIN-CHIA氏/Southern Taiwan University)」、特別賞はバキュームマウスで6位に入賞した「Micesweeper2(宇都宮正和氏)」が受賞した。
|
【動画】探索賞を受賞した「Tushi(CHANG,CHIN-CHIA氏/Southern Taiwan University)。最速走行は4:796で、4位。 |
|
【動画】6位入賞の「Micesweeper2(宇都宮正和氏)」。バキュームマウスにチャレンジする意欲と、新しい技術で成果をあげたことを評価され特別賞を受賞した。記録は4秒939。バキュームを使用した最短走行の動画。走りの違いに注目してほしい。 |
■フレッシュマン
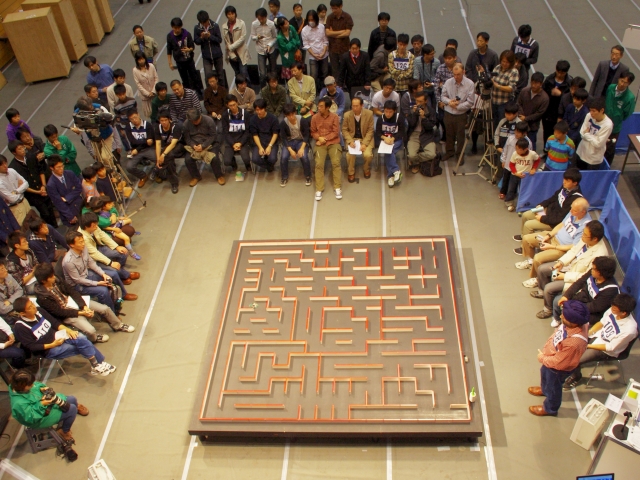
今年初の試みとして、フレッシュマンクラスに予選が導入された。予選は本迷路を4分割し、それぞれのコーナーから4台のマウスがスタートし、ゴールを目指した(画像15)。エントリーは99台で、予選に出走したのが70台。ゴールしたマウスが43台で完走率は61%だった。

|
|
|
【画像15】予選で4台同時に走行 |
【画像16】予選迷路 西回り 20歩6折、南回り 20歩6折 |

|
|
|
【画像17】フレッシュマンクラス決勝進出ロボット |
【画像18】決勝迷路 西回り 52歩17折、南回り 50歩21折 |
優勝したのは、「Mun Bbaeng」(Mun Byeongjun氏/Dankook UNIV)で記録は、07秒500。2位に「kuppaSP」(高橋良太氏/東京理科大学Mice)8秒604、3位に「こぺるにくす」(若杉俊哉君/渋谷教育学園幕張中学校電気部)が09秒467で続いた。
ちなみに、16×16の迷路を7秒台でゴールするのは、2005年のエキスパートクラス優勝ロボットのレベルだ。迷路の難易度が違うとはいえ、フレッシュマンクラスがこのタイムでゴールできるようになったことに驚嘆する。
競技を見ていても、ナナメ走行スラローム走行の技術を取り入れているマウスが多かった。このようにフレッシュマンクラスのレベルが格段にアップしているのは、インターネットで動画や情報の共有化が進んだことも理由の一つだろう。
マイクロマウスは、ロボットコンテストの中でもレベルが高いが、ネット上の情報が増えたことで初心者も参加しやすくなっている。
そしてこの数年は、大学生を中心に若手の層が一段と厚くなってきてた。学生は、身近に仲間を増やしお互いが切磋琢磨できるため、技術が一気に伸びる傾向がある。若い技術者の躍進が、今後ますます楽しみだ。

|
|
|
【画像19・20】フレッシュマンクラス優勝。探索賞受賞。「Mun Bbaeng(Mun Byeongjun氏/Dankook UNIV.)」。記録は00:07:500 |
|

|
|
|
【画像21・22】フレッシュマンクラス2位。自律賞 受賞。「kuppaSP(高橋良太氏/東京理科大学Mice)。記録は00:08:604 |
|

|

|
|
【画像23・24】史上最年少のマウサー若杉俊哉君(渋谷教育学園幕張中学校電気部)。フレッシュマンクラス3位入賞。優秀賞受賞。記録は00:09:467 |
|

|
|
|
【画像25・26】特別賞の東京工芸大学からくり工房。みんなで作れば楽しさ倍増! |
|
■ユニークなマウス紹介
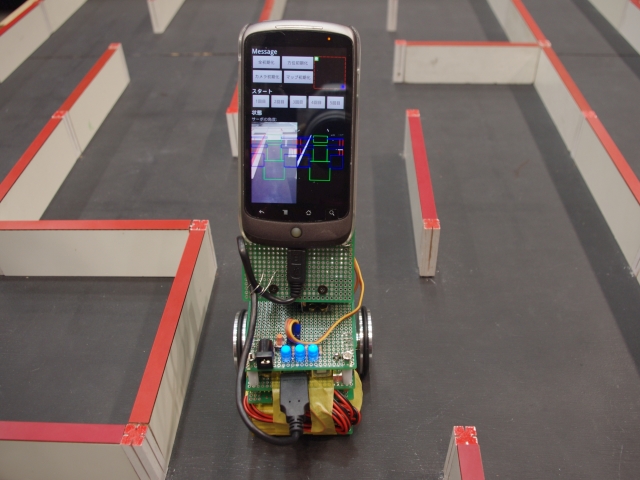
フレッシュマンクラスに、Andoroid携帯を搭載したマウス「DroidEek-01(徳久文彬氏/東京工業大学ロボット技術研究会)が出場していた(画像27)。カメラセンサだけでは、左右の認識ができず姿勢制御が困難で、残念ながら迷路探索はできなかった。アイデアが面白かったので紹介しよう。モニタを見せていだくと、携帯カメラで撮影した画像が、モニタの左下に表示されている。この画像をOpenCVで壁の上面の赤色の部分とそれ以外で2値化したのが、右側の映像だ。こうして壁の位置を認識して、迷路を探索するそうだ。
徳久氏はハードよりもソフトが得意で、Androidアプリを活用したマウスを考えたという。最速を極めるだけでなく、こうした自分の得意を伸ばすユニークなチャレンジの場として、マイクロマウスに参加するのもも面白い。

|
|
|
【画像27】予選競技中の「DroidEek-01(徳久文彬氏/東京工業大学ロボット技術研究会) |
【画像28】「DroidEek-01」のモニタ。上部に4つボタンが並んでいる横エリア内に、迷路図が表示される |
■競技風景

|

|
|
【画像29・30】ピット調整風景 |
|

|

|
|
【画像31・32】フレッシュマンクラス予選風景 |
|

|

|
|
【画像33・34】エキスパートクラス予選風景 |
|
|
|
|
【画像35】エキスパートクラス決勝進出マウス |
【画像36】エキスパートクラス決勝風景 |
|

|
|
【画像37・38】エキスパートクラス決勝風景 |
|

|

|
|
【画像39・40】エキスパートクラス決勝風景 |
|
■マイクロマウスパーティ

|
|
|
【画像41・42】初日に恒例のマイクロマウスパーティが開催された |
|

|

|
|
【画像43・44】例年以上に、参加者同士の交流が盛んだった |
|

|

|
|
【画像45・46】マイクロマウスパーティーの最中、翌日の準備をするスタッフ |
|

|
|
|
【画像47・48】スタッフの方たちのおかげで、大会はスムースに運営された |
|