















==============================================================================
「ロボトレース競技」レポート
~全長58mの決勝コース。優勝は、村石亘氏(埼玉工業大学工学部石原研)
==============================================================================
 IMGP3394.JPG
IMGP3394.JPG第31回マイクロマウス競技会 ロボトレース競技
今大会は、予選1位~3位のトレーサーが揃って第2走行に失敗するという波乱に満ちた結果となった。難易度の高いコースを攻略し、村石亘氏(埼玉工業大学工学部石原研)が36秒550で初優勝した。
高い自律性が求められる「ロボトレース競技」
ロボトレース競技は、この数年、波乱の結果が続いている。2008年から、それまで上位マシンが必ず搭載していた吸引機構が禁止され、新たな技術チャレンジが参加者に要求されるようになったからだ。このルール変更は、ロボトレース競技の目指す技術が、自律操縦の巧みさとスピードとを競う点にあることを明確に打ち出すものだ。
吸引機構の搭載は、高速走行に有利だ。しかし、委員会が求めているのは、第1走行でロボットがライン上にあるマーカーを検知・記憶し、コースを分析して第2走行以降は最適なライン取りで走行してタイムを競うことにある。
F1レースでドライバーが、車体性能と自分のテクニックによってコース取りを決定するように、ロボットが自律的にライン取りして最短距離を攻めてほしいのだ。
競技ルールで、「車体がコースから離れた場合、走行は無効となる」と規定されているが、ボディの一部がコース上にあればコースアウトとはならない。緩やかなS字カーブはコースを忠実になぞるのではなく直進したり、コーナーの先にあるコースに応じて、最適なライン取りを計算する技術を委員会は期待している。
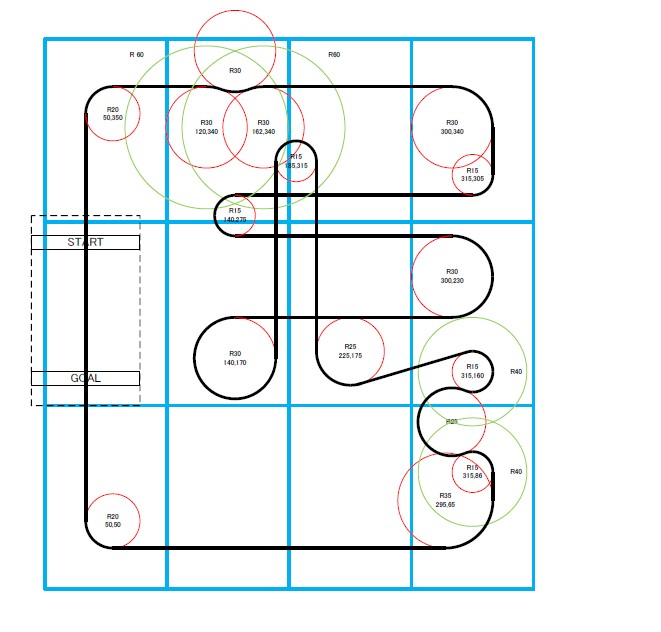
こうした高い自律性を求める半面、委員会は、ロボトレース競技参加する高校生ら初心者に対する配慮も忘れていない。予選コースは、「多くの参加者に完走する喜びと達成感を感じてほしい」と、初心者でも完走できる難易度で設計している。、
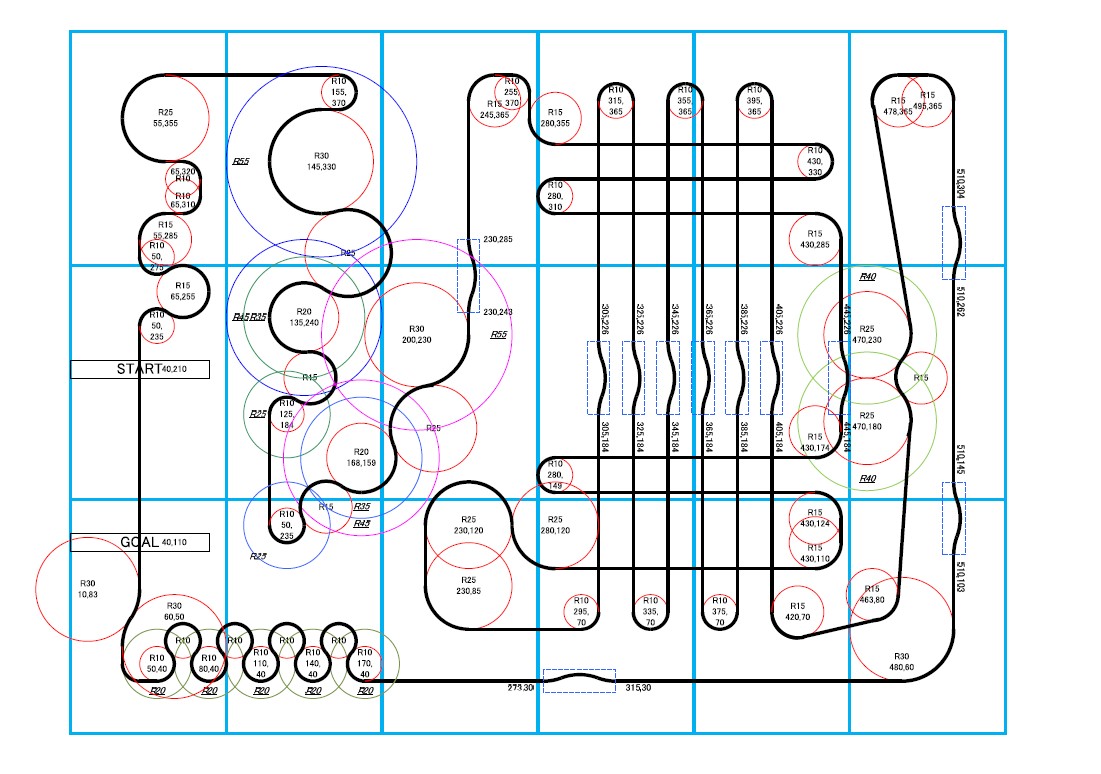
そして決勝コースは、格段に難易度がアップする。今年はご覧のとおり距離が58mと長く、交叉点も多い複雑なコースになった。持ち時間3分内に3回の走行ができたトレーサーは1台もない厳しいレースだった。
 2010RT_Map_Prelim.jpg
2010RT_Map_Prelim.jpg予選コース
 2010RT_Map_Final.jpg
2010RT_Map_Final.jpg決勝コース
 IMGP3225.JPG
IMGP3225.JPG予選競技風景
IMGP3394.JPG決勝競技風景
初優勝「Villagestone」村石亘氏(埼玉工業大学工学部石原研)
予選には104台が出走し、51台が完走した。予選通過し決勝に進んだのは32台、予選通過タイムは22秒473だった。前述の通り、決勝で3回の走行をクリアしたマシンはなかった。特に、予選上位陣が第2走行に失敗しリタイアしていくと、客席から落胆の声が漏れた。
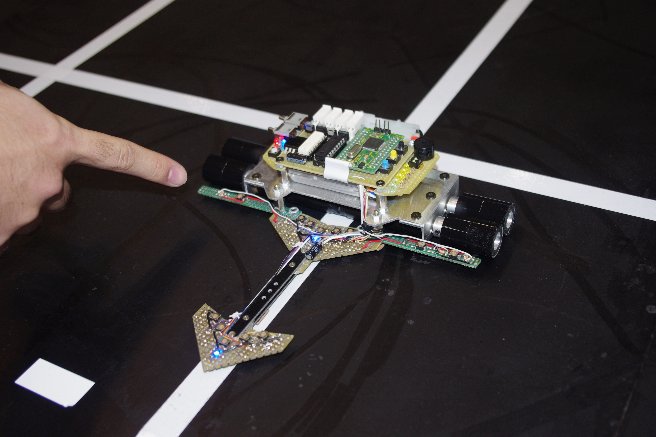
厳しいコースをクリアし、優勝したのは「Villagestone」(村石亘氏/埼玉工業大学工学部石原研)だ。「Villagestone」は、予選で12秒647を出し7位で通過した。決勝は、第1走目はスタートゲートにぶつかってリタイヤ。2走目で38秒701、3走目で36秒550と記録を縮めた。
・「Villagestone」の最速走行
「Villagestone」は、去年の学生大会出場マシンを改造してものだという。製作者の村石亘さんに伺うと、スピードよりも安定性を重視し、確実にラインをトレースするためにセンサーを7個から13個に増やしたそうだ。マーカーを確実に読み取るために左側に1つ多く配置している。
今年はマーカーを確実に検知しデバッグもできるようするなど、ソフトに力をいれたそうだ。「決勝コースは、距離は長いが直線が少なくて難しかった。スピードよりも安定性を重視したコンセプトが有利に働いた」と、村石さんは語った。
委員会が提示しているコースをショートカットする課題については、マシンの試作をしているが大会には間に合わなかったそうだ。ステッピングモーターやエンコーダーを試したが距離を正確に計測できず、自己位置推定がまだできていない状態だという。来年は、自己位置推定ができるようになりたいと、抱負を述べた。
 IMGP3627.JPG
IMGP3627.JPG優勝した村石亘氏(埼玉工業大学工学部石原研)
 IMGP3628.JPG
IMGP3628.JPG優勝マシン「Villagestone」
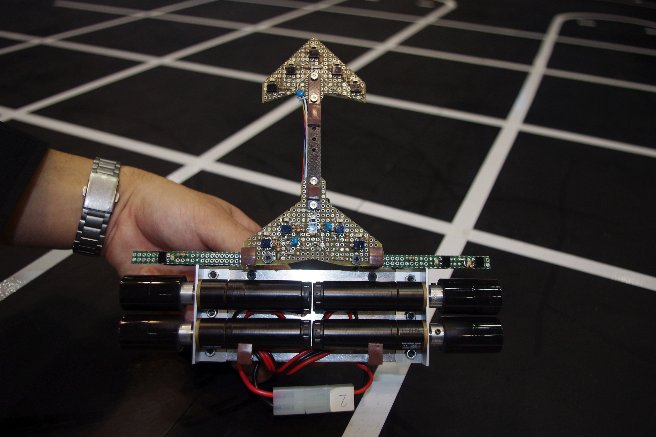 IMGP3632.JPG
IMGP3632.JPG「Villagestone」のセンサ配置
自己位置推定でコースを自動生成するマシンに期待
決勝コースは長い直線が存在しないため、速く走行するためには自己位置推定が重要となるレイアウトだ。決勝で委員会が望むような走りを見せたのは、3位に入賞した「NTD」(Chih-Yuan Lin氏/LungHwa University of Science and Technology)だった。
「NTD」は、第1走目はコース上のマーカーを記憶しながら1分09秒427でゴールした。そして、第2走目で記録を39秒529に縮めている。第3走目は、37秒124だったがこれは走行中にタイムアウトとなり記録として認められなかった。
動画で第1走目と2走目を比較すると、直線でしっかり加速しているのが分かる(動画内、ココ!参照)。カーブと直線で緩急をつけた美しい走り方だ。
・3位入賞した「NTD」の第1走行
・「NTD」の最速走行
直線コースの途中にある凸部分を「NTD」はスピードを落としてトレースしている。委員会は、「この部分を直進すれば、タイムを格段に縮められる」と期待している。そのために必要になるのが、自己位置推定してコースを生成し自律的に走る技術だ。
予選を上位で通過したマシンは、この新たな技術にチャレンジしている。予選上位3名の走りを動画で紹介しよう。動画は第1走目と最速走行を続けて編集しているので、走りの違いを見比べてほしい。
予選1位で通過した「Ning3」(Ng Beng Kiat氏/Ngee Ann Polytechnic)は、第1走目は32秒461で、最速走行が10秒004だ。タイムをほぼ1/3に縮めている。
2位の「Cartis01」(平井雅尊氏/電気通信大学IS研究科)、3位の「FRAGILE010RT」(河野純也氏/日産自動車株式会社)も同様だ。
・予選1位「Ning3」(Ng Beng Kiat氏/Ngee Ann Polytechnic)
 IMGP3389.JPG
IMGP3389.JPG予選1位。「Ning3」(Ng Beng Kiat氏/Ngee Ann Polytechnic)
・予選2位。「Cartis01」(平井雅尊氏/電気通信大学IS研究科)
 IMGP3255.JPG
IMGP3255.JPG予選2位。「Cartis01」(平井雅尊氏/電気通信大学IS研究科)
・予選3位。「FRAGILE010RT」(河野純也氏/日産自動車株式会社)
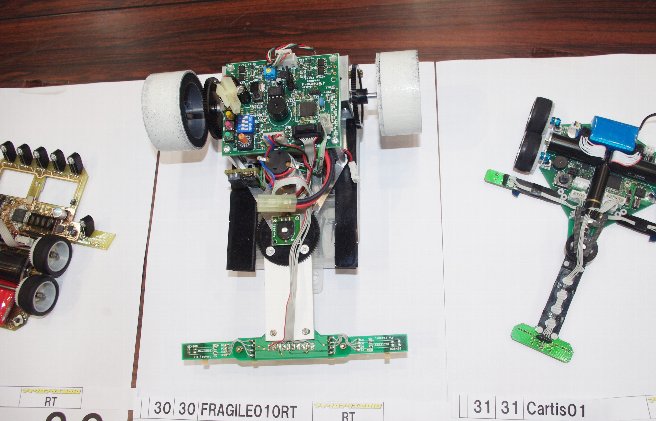 IMGP3391.JPG
IMGP3391.JPG予選3位。「FRAGILE010RT」(河野純也氏/日産自動車株式会社)
決勝では、残念ながらこれらの走りを見ることができなかった。「FRAGILE010RT」は、ゴール手前の連続タコ壺でコースアウトしてリタイア。「Cartis01」は第1走目を43秒271でゴールしたが、プログラムがルート生成できずにもう一度、マーカーを記憶する走行を繰り返した。
「Ning3」は、第1走目を1分15秒621で走った後、第2走目はスタートラインからまっすぐに直進してしまった。第2走行の生成ができないと判断して、リタイアした。
競技終了後に話を伺うと、「Ning3」はマーカーの数が多くオーバーフローしてしまい第2走行用のルート生成ができなかったそうだ。一方、「Cartis01」は、走行ログ用配列が不足してしまったという。どちらも、想定より長いコースに苦しめられたわけだ。
決勝コースが規定の60m近くにまで伸びたのは、2008年からだ。それ以前は決勝も30m程度の距離だった。委員会が求める自律的・知能的走行とは別に、この距離に苦しむ参加者は多い。今大会で決勝コースを3走できたマシンが1台もなかったのは、その表れだ。
実際問題として、練習用に60mのコースを設営できる環境はなかなかないだろう。しかし、これは、簡単な方法で解決できる。仮に20mのテストコースを用意できるのなら、マシンがスタートした後にスタート/ゴールのマーカーを外して3周させればいい。大会前に長い距離を試走させるのは、ぜひやってほしいと思う。
原因はともかく、予選上位3名のマシンによる最速走行が見られなかったのが、非常に残念だ。
特に平井雅尊氏の「Cartis01」は、コースマーカーを記憶しながら走っても、43秒271の好タイムで7位になっている。最適ルートの生成がうまくいっていたら、どれくらい記録を縮めただろうか?
「Cartis01」は、今年の学生大会や中部地区大会で優勝している。決勝では残念ながらマシンの性能を発揮できなかったが、委員会は「Cartis01」が、自己位置推定をして走行している技術を評価し、ニューテクノロジー賞を贈った。
 IMGP4059.JPG
IMGP4059.JPGニューテクノロジー賞受賞の平井雅尊氏
来年度の大会はどのようなマシンが登場して、委員会の課題をクリアするのだろうか? 参加者の技術チャレンジに期待したい。
スナップ
 IMGP4042.JPG
IMGP4042.JPG IMGP3248.JPGIMGP3225.JPG
IMGP3248.JPGIMGP3225.JPG IMGP3205.JPG
IMGP3205.JPG IMGP3213.JPG
IMGP3213.JPG IMGP3249.JPG
IMGP3249.JPG IMGP3214.JPG
IMGP3214.JPG IMGP3311.JPG
IMGP3311.JPG IMGP3386.JPG
IMGP3386.JPG IMGP3393.JPG
IMGP3393.JPG IMGP3251.JPG
IMGP3251.JPG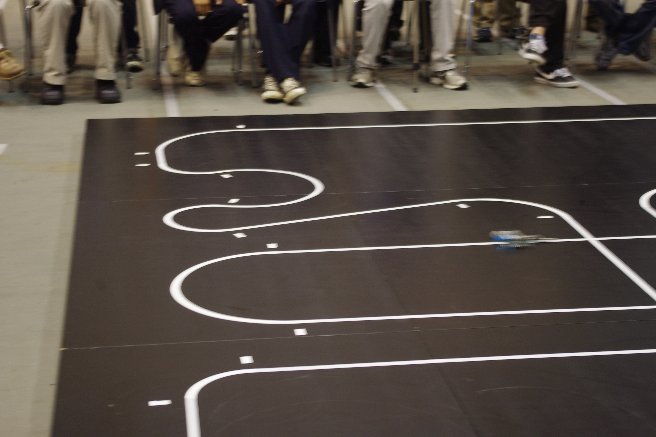 IMGP3252.JPG
IMGP3252.JPG IMGP3442.JPG
IMGP3442.JPG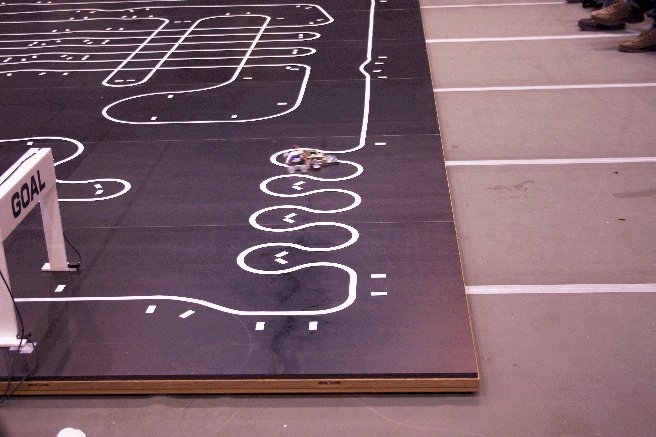 IMGP3460.JPG
IMGP3460.JPG IMGP3604.JPG
IMGP3604.JPG